A Rotating Cube

Given a cube with edge length l and mass M , what is the moment of inertia about the space diagonal?
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
5 solutions
how did you find the value of your inertia in x axis??
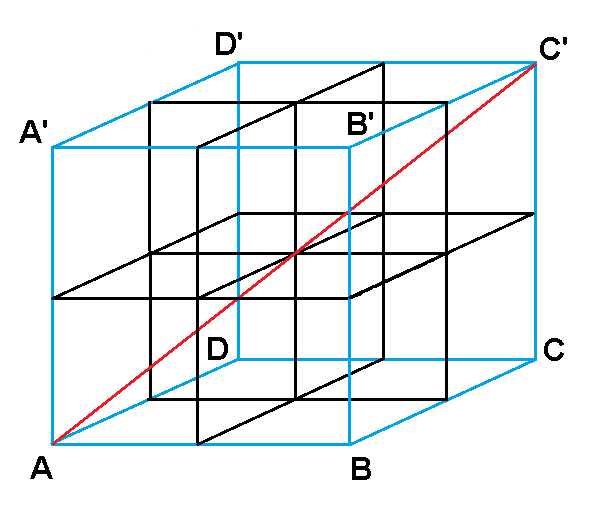
Consider dividing the cube into 8 smaller cubes:
 Every smaller cube has mass
8
M
and length
2
l
.
Every smaller cube has mass
8
M
and length
2
l
.
Since the moment of inertia is proportional to M and l 2 , then the moment of inertia of a smaller cube relative to its' diagonal is I ′ = 8 1 . 4 1 I = 3 2 1 I .
Now we have to express the total moment of inertia I by adding the moments of inertia from the smaller 8 cubes. The diagonal A C ′ passes through the centers of 2 of them and their moment of inertia is just added directly, but for the other 6 cubes we will have to use the Parallel axis theorem .
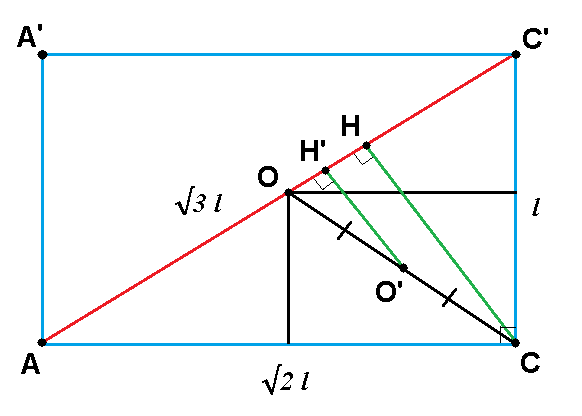
From the symmetry it's easy to see that all 6 cubes are equally remote from the diagonal A C ′ and we can use some basic geometry to find the distance h .
 The center
O
′
of one of the cubes will be the midpoint of
C
O
and therefore lie in the
A
C
C
′
plane.
The center
O
′
of one of the cubes will be the midpoint of
C
O
and therefore lie in the
A
C
C
′
plane.
Then we have:
h = O ′ H ′ = 2 1 C H = 2 1 A C ′ 2 S = 2 1 A C ′ A C . C C ′ = 2 1 3 2 l = 6 1 l
Now for the moment of inertia we have:
I = 8 I ′ + 6 . 8 M h 2 = 8 . 3 2 1 I + 4 3 M 6 l 2 o r 4 3 I = 4 3 6 M l 2
And so we get I = 6 1 M l 2
Good solution!
Just beautiful!
nice solution
Consider 3D-coordinate, the cube is located in x , y , z ∈ [ 0 , l ] , having density σ = l 3 M .
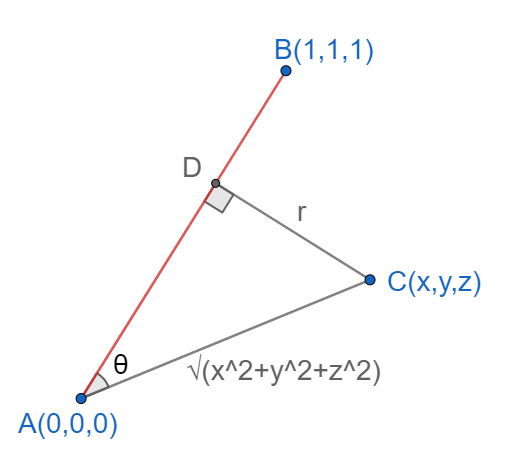
Let A ( 0 , 0 , 0 ) , B ( 1 , 1 , 1 ) , C ( x , y , z ) , using dot product, we can calculate the angle between A B and A C , we have cos 2 θ = 3 x 2 + 3 y 2 + 3 z 2 ( x + y + z ) 2
The distance from any point C in the interior of the cube to the rotate axis is denoted as r , and r = x 2 + y 2 + z 2 sin θ is the relation we can use to determine the moment of inertia:
r 2 = ( x 2 + y 2 + z 2 ) ( 1 − cos 2 θ ) = ( x 2 + y 2 + z 2 ) [ 1 − 3 x 2 + 3 y 2 + 3 z 2 ( x + y + z ) 2 ] = 3 2 ( x 2 + y 2 + z 2 − x y − y z − z x )
Then the moment of inertia is I = ∭ r 2 d m = ∭ r 2 σ d z d y d x = 3 2 σ ∫ 0 l ∫ 0 l ∫ 0 l ( x 2 + y 2 + z 2 − x y − y z − z x ) d z d y d x = 6 1 σ l 5 = 6 1 M l 2
I did almost the same, but without trig. I defined the diagonal as (x,y,z) = (a,a,a). The distance r from a point (x,y,z) to (a,a,a) satisfies r^2=(x-a)^2 + (y-a)^2 + (z-a)^2 and the distance to the diagonal is found by taking the derivative with respect to a, and setting that to zero. This gives a = (x+y+z)/3 and hence r^2 = 2/3(x^2+y^2+z^2-xy-yz-xz) quite easily. After this I did the exact same integral as you did.
https://www.youtube.com/watch?v=CqPjWjhURDw
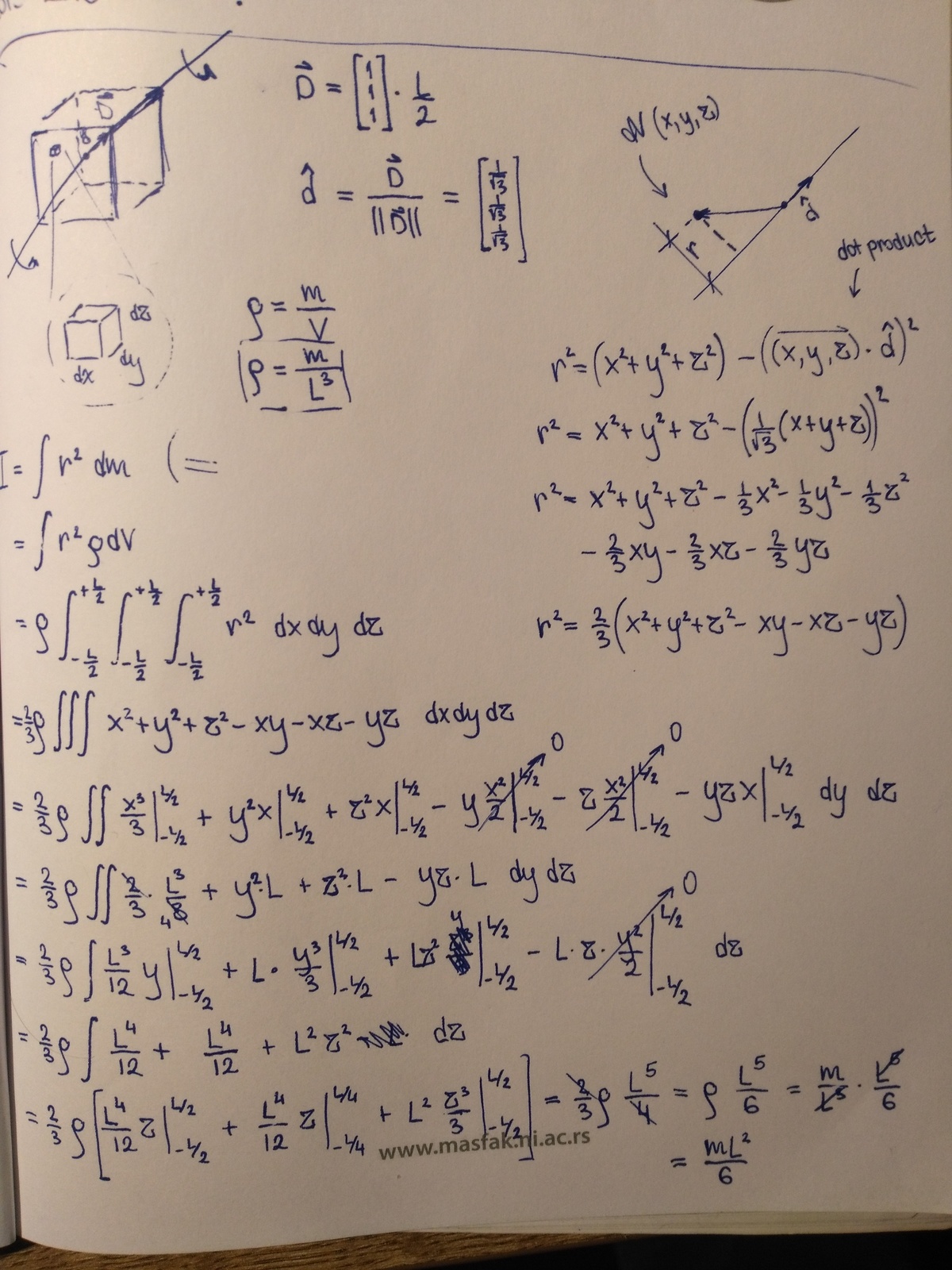
Clarification : I set the center of the cube to be the center of a 3D Cartesian coordinate system. I also defined a unit vector d ^ in the direction of the space diagonal. I further use dot product and Pythagorean theorem to find the squared distance r 2 between the space diagonal and a random point ( x , y , z ) in the interval x ∈ ( − L / 2 , L / 2 ) , y ∈ ( − L / 2 , L / 2 ) and z ∈ ( − L / 2 , L / 2 ) in terms of x , y and z .
Let us place the cube in a center of reference so that its center is at the origin and its edges are parallel to the axes. It is easy to calculate the moment of inertia around the x axis: I x x = 6 1 m ℓ 2 , see below. Due to the cubic symmetry the moment of inertia is the same for all 3 axes. I y y = I z z = I x x
The moment of inertia is a tensor. If the tensor is diagonal, and all of the diagonal elements are the same, than the tensor will be invariant under the rotations of the reference frame. Therefore the moment of inertia of a cube is the same, I = 6 1 m l 2 , for all axes of rotations that go through the center .
Calculation of I x x : The cube can be viewed as many squares layered on the top is each other. The moment of inertia of the cube is the same as the moment of inertia of a square in the y , z plane, with an axis of rotation in the x direction, going through the center. According to the perpendicular axis theorem the moment of inertia of a planar object satisfies I x x = I y y + I z z . Due to symmetry I y y = I z z , so I x x = 2 I y y . For calculating I y y we consider the square as a collection of rods, of length ℓ , all perpendicular to the axis of rotation, with the axis in the center of the rods. The moment of inertia of the rod is I = 1 2 1 m ℓ 2 , therefore I y y = 1 2 1 m ℓ 2 and I x x = 6 1 m ℓ 2