Colliding Spring System
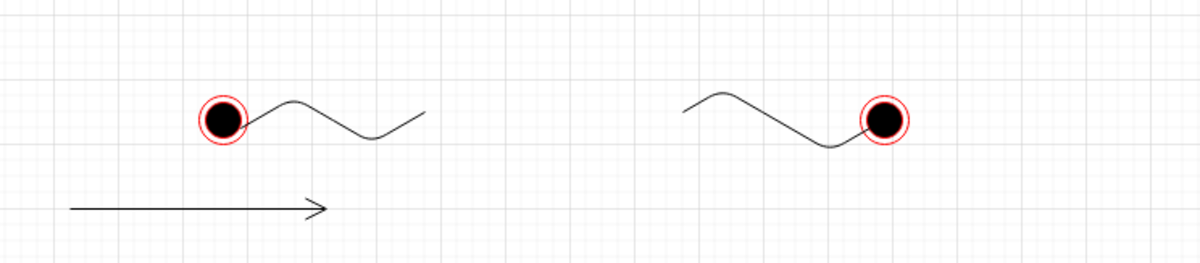
I have two springs (with negligible mass), Spring 1 and Spring 2, that obey Hooke's law. They each have point masses attached to them on one end with masses m 1 and m 2 , respectively. The lengths of Spring 1 and Spring 2, when they are at their equilibrium states, are l 1 and l 2 and their spring constants k 1 and k 2 , respectively. Nothing is attached to the other end of the springs, so long as nothing is exerting a force on the springs, they maintain their equilibrium state and, if perturbed, will restore instantaneously to their equilibrium states if forces are no longer acting on the side that does not contain the point mass. I put Spring 1 and Spring 2 on a frictionless track so that they can only move and oscillate along a single axis. The location of the point masses are tracked by x 1 (location of Spring 1's mass) and x 2 (location of Spring 2's mass). I then move Spring 2's mass to the location x 2 = l 1 + l 2 , so that the spring portion is on the negative side of the mass, and the mass is at rest. Next, I arrange Spring 1 on the track so that the spring portion is on the positive side of its point mass, and the spring, as a whole, is on the negative side of Spring 2. Finally, I fire Spring 1 toward Spring 2 at a constant velocity, u , with no external forces, so that Spring 1 collides with Spring 2. Let t = 0 be the point in time at which they first come into contact. Which matrix equation (with initial conditions) describes this system until the point at which x 1 ′ ′ ( t ) = x 2 ′ ′ ( t ) = 0 and remain 0 ?
A
X ′ ( t ) = ⎣ ⎢ ⎢ ⎡ x 1 ′ x 2 ′ x 3 ′ x 4 ′ ⎦ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎡ 1 0 m 1 ( k 1 + k 2 ) k 1 2 m 1 ( k 1 + k 2 ) − k 1 2 0 1 m 1 ( k 1 + k 2 ) − k 2 2 m 1 ( k 1 + k 2 ) k 2 2 1 0 0 0 0 1 0 0 ⎦ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎡ x 1 x 2 x 3 x 4 ⎦ ⎥ ⎥ ⎤ + ⎣ ⎢ ⎢ ⎢ ⎡ 0 0 − m 1 k 2 l 1 + m 1 ( k 1 + k 2 ) k 1 ( k 2 l 2 − k 1 l 1 ) m 1 k 2 l 1 − m 1 ( k 1 + k 2 ) k 2 ( k 2 l 2 − k 1 l 1 ) ⎦ ⎥ ⎥ ⎥ ⎤
X ( 0 ) = ⎣ ⎢ ⎢ ⎡ l 1 l 1 + l 2 u 0 ⎦ ⎥ ⎥ ⎤
B
X ′ ( t ) = ⎣ ⎢ ⎢ ⎡ x 1 ′ x 2 ′ x 3 ′ x 4 ′ ⎦ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎡ 0 0 − m 1 ( k 1 + k 2 ) k 1 k 2 m 2 ( k 1 + k 2 ) k 1 k 2 0 0 m 1 ( k 1 + k 2 ) k 1 k 2 − m 2 ( k 1 + k 2 ) k 1 k 2 1 0 0 0 0 1 0 0 ⎦ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎡ x 1 x 2 x 3 x 4 ⎦ ⎥ ⎥ ⎤ + ⎣ ⎢ ⎢ ⎢ ⎡ 0 0 − m 1 ( k 1 + k 2 ) k 1 k 2 ( l 1 + l 2 ) m 2 ( k 1 + k 2 ) k 1 k 2 ( l 1 + l 2 ) ⎦ ⎥ ⎥ ⎥ ⎤
X ( 0 ) = ⎣ ⎢ ⎢ ⎡ 0 l 1 + l 2 u 0 ⎦ ⎥ ⎥ ⎤
C
X ′ ( t ) = ⎣ ⎢ ⎢ ⎡ x 1 ′ x 2 ′ x 3 ′ x 4 ′ ⎦ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎡ 0 0 − m 1 ( k 1 + k 2 ) k 1 2 m 2 ( k 1 + k 2 ) k 2 2 0 0 m 1 ( k 1 + k 2 ) k 1 2 − m 2 ( k 1 + k 2 ) k 2 2 1 0 0 0 0 1 0 0 ⎦ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎡ x 1 x 2 x 3 x 4 ⎦ ⎥ ⎥ ⎤ + ⎣ ⎢ ⎢ ⎢ ⎡ 0 0 m 1 ( k 1 + k 2 ) k 1 2 ( l 1 + l 2 ) m 2 ( k 1 + k 2 ) k 2 2 ( l 1 + l 2 ) ⎦ ⎥ ⎥ ⎥ ⎤
X ( 0 ) = ⎣ ⎢ ⎢ ⎡ 0 l 1 + l 2 u 0 ⎦ ⎥ ⎥ ⎤
D
X ′ ( t ) = ⎣ ⎢ ⎢ ⎡ x 1 ′ x 2 ′ x 3 ′ x 4 ′ ⎦ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎡ 0 0 m 1 ( k 1 + k 2 ) k 1 k 2 − m 2 ( k 1 + k 2 ) k 1 k 2 0 0 − m 1 ( k 1 + k 2 ) k 1 k 2 m 2 ( k 1 + k 2 ) k 1 k 2 1 0 0 0 0 1 0 0 ⎦ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎡ x 1 x 2 x 3 x 4 ⎦ ⎥ ⎥ ⎤ + ⎣ ⎢ ⎢ ⎢ ⎡ 0 0 m 1 ( k 1 + k 2 ) k 1 k 2 ( l 1 − l 2 ) − m 2 ( k 1 + k 2 ) k 1 k 2 ( l 1 − l 2 ) ⎦ ⎥ ⎥ ⎥ ⎤
X ( 0 ) = ⎣ ⎢ ⎢ ⎡ 0 l 1 + l 2 u 0 ⎦ ⎥ ⎥ ⎤
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
Let x 3 represent the point of contact between the springs. Then we have, by Newton's third law and Hooke's law,
k 1 ( l 1 − ( x 3 − x 1 ) ) = k 2 ( l 2 − ( x 2 − x 3 ) )
⇒ x 3 = k 1 + k 2 k 1 l 1 − k 2 l 2 + k 1 + k 2 k 1 x 1 + k 1 + k 2 k 2 x 2 .
Let F = − k 1 ( l 1 − ( x 3 − x 1 ) ) .
Then m 1 x 1 ′ ′ = F = − m 2 x 2 ′ ′ .
F = − k 1 ( l 1 − ( k 1 + k 2 k 1 l 1 − k 2 l 2 + k 1 + k 2 k 1 x 1 + k 1 + k 2 k 2 x 2 − x 1 ) )
= − k 1 + k 2 k 1 k 2 x 1 + k 1 + k 2 k 1 k 2 x 2 − k 1 + k 2 k 1 k 2 ( l 1 + l 2 ) .
The resulting equations follow if you let x 3 = x 1 ′ and x 4 = x 2 ′ .