Coupled oscillators
Coupled oscillators are one of the most common physical systems in nature. For example, atoms in a crystal can be modeled as coupled oscillators. Moreover, the Taylor expansion of any potential around its minimum gives a term that produces oscillations, so an oscillatory motion is inherent to natural systems, much more than a linear motion. In this problem, you will completely describe the simplest coupled system of two masses.
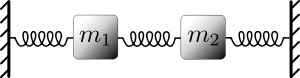
Two equal masses m = 1 kg are connected with a spring and then connected with walls. Initially, the masses are at rest. Then the first mass is displaced to the right for d = 1 0 cm and released.
What's the absolute value of the distance from the equilibrium position ( in cm ) of the second mass after t ′ = 5 s ?
Details and Assumptions:
- All the springs have elasticity coefficient k = 1 6 N/m .
- Ignore gravity and any kind of friction.
- You don't have to do extensive calculations to deduce the normal mode frequencies of the system.
The answer is 7.023.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
7 solutions
On method 2, if the eigenvectors didn't form a orthogonal matrix, it wouldn't be like this. I think that it would be necessary to calculate the inverse matrix of the eigenvectors, rigorously speaking. Just thinking, i'm not 100% sure.
Log in to reply
Thank you for your advice. I should have added the proof in my solution:
It can be shown that if there are n distinct eigenvalues for a n × n matrix, the matrix has n linearly independent eigenvectors and thus is diagonalisable. In this case, since the 2 × 2 matrx has two disctinct eigenvalues, it is diagonalisable.
Wow, I feel stupid.
I did this problem with x 2 ( 0 ) = 5 and got 5 . 5 5 .
Let write the equations of motions as below: m d t 2 d 2 x 1 + m ω 0 2 x 1 + k ( x 1 − x 2 ) = 0 m d t 2 d 2 x 2 + m ω 0 2 x 2 − k ( x 1 − x 2 ) = 0 Where ω 0 is the natural frequency of either of the spring. By put ω c = m k (Hooke’s Law) hence we get the new equation as below.
d t 2 d 2 x 1 + ( ω 0 2 + ω c 2 ) x 1 − ω c 2 x 2 = 0 d t 2 d 2 x 2 + ( ω 0 2 + ω c 2 ) x 2 − ω c 2 x 1 = 0 We can rewrite the equations: d t 2 d 2 q 1 + ω 0 2 q 1 = 0 d t 2 d 2 q 2 + ω ′ 2 q 2 = 0 With q 1 = A c o s ( ω 0 t ) and q 2 = B c o s ( ω ’ 2 t ) . Thus we get x 1 = q 1 + q 2 = A c o s ( ω 0 t ) + B c o s ( ω ’ t ) x 2 = q 1 + q 2 = A c o s ( ω 0 t ) − B c o s ( ω ’ t ) With ω 0 = m k = 4 and ω ’ = m 3 k = 4 3
By solving when it in initial condition we may obtain A = B = 5 cm
Hence, the absolute value of the distance from the equilibrium position when t = 5 is
= ∣ 5 cos ( 5 ω 1 ) − 5 cos ( 5 ω 2 ) ∣
= ∣ 5 cos ( 5 × 4 ) − 5 cos ( 5 × 4 3 ) ∣
= 7 . 0 2 3 cm
According to Newton Law II, we have:
m x 1 ′ ′ = − k x 1 − k ( x 1 − x 2 )
and m x 2 ′ ′ = − k x 2 + k ( x 1 − x 2 ) .
Therefore, m ( x 1 + x 2 ) ′ ′ = − k ( x 1 + x 2 )
and m ( x 1 − x 2 ) ′ ′ = − 3 k ( x 1 − x 2 ) .
Therefore, x 1 + x 2 = A cos ( ω 1 t + ϕ 1 )
and x 1 − x 2 = B cos ( ω 2 t + ϕ 2 ) , with ω 1 = m k , ω 2 = m 3 k .
When t=0, x 1 = d , x 2 = 0 , x 1 ′ = x 2 ′ = 0 , so A = B = d , ϕ 1 = ϕ 2 = 0 .
Therefore, x 2 = 2 d ( cos ω 1 t − cos ω 2 t ) .
Therefore, when t = t ′ = 5 s , x 2 = 7 . 0 2 c m
By symmetry, the two modes of the problem are the symmetric mode ( x 2 = x 1 ) and the antisymmetric mode ( x 2 = − x 1 ).
In the symmetric mode, the spring between the blocks is always at equillibrium length. So the force the first block feels is only from first spring and the time period is same as that for a single block-spring system : ω 1 = m k
In the antisymmetric mode, the elongation of the central spring is twice that of either end spring. Hence the block feels thrice as much force as in a single block-spring system : ω 2 = m 3 k
Since both blocks start from rest, displacements of the two blocks can be written as: x 1 = A cos ( ω 1 t ) + B cos ( ω 2 t ) x 2 = A cos ( ω 1 t ) − B cos ( ω 2 t )
Solving for initial conditions gives A = B = 5 c m
Hence the required answer is 5 ( cos ( 5 ω 1 ) − cos ( 5 ω 2 ) ) = 7 . 0 2 3 c m
PS: If someone is not convinced of the symmetry argument for the normal modes, write out the total force in terms of displacements of either block. You will find that the governing equations reduce to SHM equations with change of variables y = x 1 + x 2 , z = x 1 − x 2
When the m 1 block moves a distance d = 1 0 c m towards right.
Then one can easily obtained the equation of motions from their respective free body diagrams of m 1 amd m 2 blocks .
BUt given that the masses are same . Let us say m 1 = m 2 = m) .
Here are the equations
m x 1 ′ ′ + k x 1 − k ( x 2 − x 1 ) = 0
m x 2 ′ ′ + k x 2 − k ( x 1 − x 2 ) = 0
Rearranging these two equations and dividing both two equations by m . we obtain ,
x 1 ′ ′ + ( m 2 k ) x 1 − ( m k ) x 2 = 0
x 2 ′ ′ + ( m 2 k ) x 2 − ( m k ) x 1 = 0
we first add the two equations together, and then subtract them, to obtain two new equations
( x 1 + x 2 ) ′ ′ + ( m k ) ( x 1 + x 2 ) = 0 - (1)
( x 1 − x 2 ) ′ ′ + ( m 3 k ) ( x 1 − x 2 ) = 0 - (2)
Now we change to our normal coordinates q 1 and q 2 . We will also make a substitution for w 1 and w 2 , the normal frequencies of the system. It turns out that these normal frequencies are the frequencies at which the masses oscillate in their normal modes of vibration.
q 1 = x 1 + x 2 and w 1 = m k
q 2 = x 1 − x 2 and w 2 = m 3 k
Substituting into equation (1) and (2) , we obtain ;
q 1 ′ ′ + w 1 2 q 1 = 0
q 2 ′ ′ + w 2 2 q 2 = 0
NOTE : THIS DIFFERNTIAL EQUATION IS SIMILAR TO HARMONIC OSCILLATOR. We all know the solution of such kind of second order differential equation , which is of the form
q 1 ( t ) = c 1 c o s ( w 1 t ) + c 2 s i n ( w 1 t )
q 2 ( t ) = c 3 c o s ( w 2 t ) + c 4 s i n ( w 2 t )
Now we use the relationship x 1 = 2 q 1 + q 2
x 2 = 2 q 1 − q 2
to give the general solution for x 1 and x 2 .
x 1 ( t ) = c 1 c o s ( w 1 t ) + c 2 s i n ( w 1 t ) + c 3 c o s ( w 2 t ) + c 4 s i n ( w 2 t ) -(3)
x 2 ( t ) = c 1 c o s ( w 1 t ) + c 2 s i n ( w 1 t ) − c 3 c o s ( w 2 t ) − c 4 s i n ( w 2 t ) -(4)
In the ques , we are given that the block m 1 moved towards right a distance d = 1 0 c m .
Thus ,
x 1 ( 0 ) = d and x 1 ′ ( 0 ) = 0
x 2 ( 0 ) = 0 and x 2 ′ ( 0 ) = 0
After substituting these values into Equation 3 and Equation 4 we can solve for the constants c 1 , c 2 , c 3 , a n d c 4 .
Hence , we have our final solutions ,
x 1 = 2 d [ c o s ( w 1 t ) + c o s ( w 2 ) t ] - (5)
x 2 = 2 d [ c o s ( w 1 t ) − c o s ( w 2 t ) ] - (6)
Hence in equation (6) . Put , the values of w 1 and w 2 and t = 5 , then solve for x 2 .
WE will get x 2 = 7 . 0 2 3 c m .
Let's write the moviment equations for
x
1
and
x
2
:
$$
m\ddot{x}
1 = k(x
2 - x
1) - kx
1
$$
$$
m\ddot{x}
2 = -k(x
1 - x
2) - kx
2
$$
Leading us to the following system:
$$
\ddot{x}
1 = -\frac{2k}{m}x
1 + \frac{k}{m}x
2
$$
$$
\ddot{x}
2 = \frac{k}{m}x
1 - \frac{2k}{m}x
2
$$
Finding the eigenvalues of the coefficients matrix:
$$
\lambda
1 = - \frac{k}{m} \quad \lambda
2 = -\frac{3k}{m}
$$
Which represents the normal modes frequencies. The eigenvectors for these eigenvalues are respectively
ν
1
=
(
1
1
)
T
and
ν
2
=
(
1
−
1
)
T
. Let's call
M
=
(
ν
1
ν
2
)
.$$ $$Creating
Y
=
M
X
where
X
=
(
x
1
x
2
)
T
we'll get the following:
$$
Y = MX \Rightarrow \ddot{Y} = M\ddot{X}
$$
$$
\ddot{X} = AX \Rightarrow M\ddot{Y} = AMY \Rightarrow \ddot{Y} = M^{-1}AMY \Rightarrow \ddot{Y} = HY
$$
Where
A
is the coefficients matrix and
H
the eigenvalues matrix. Solving the new system for
y
i
we'll have:
$$
\ddot{y}
1 = -\frac{k}{m}y
1 \Rightarrow \ddot{y}
1 + \frac{k}{m}y
1 = 0
$$
$$
\ddot{y}
2 = -\frac{3k}{m}y
2 \Rightarrow \ddot{y}
2 + \frac{3k}{m}y
2 = 0
$$
Which are clearly simple harmonic motions with frequencies
ω
1
=
m
k
ω
2
=
m
3
k
. Solving theses equations we have:
$$
y
1 = c
1 \cos \left( \omega
1t + \phi
1\right), \quad y
2 = c
2 \cos \left( \omega
2t + \phi
2 \right)
$$
Now, getting
x
1
and
x
2
:
$$
Y = MX \Rightarrow X = M^{-1}Y
$$
We'll find:
$$
x
1 = k
1\cos(\omega
1t + \phi
1) + k
2\cos(\omega
2t + \phi
2)
$$
$$
x
2 = k
1\cos(\omega
1t + \phi
1) - k
2\cos(\omega
2t + \phi
2)
$$
Where
k
i
=
2
c
1
. Applying the initial conditions we'll find:
$$
k
1 = k
2 = \frac{d}{2}, \quad \phi
1 = \phi
2 = 0
$$
So, let's find
x
2
(
5
)
:
$$
x
2(t) = \frac{d}{2}\cdot\cos\left(\sqrt{\frac{k}{m}}\cdot t + 0 \right) - \frac{d}{2}\cdot\cos\left(\sqrt{\frac{3k}{m}}\cdot t + 0 \right)
$$
$$
x
2(5) = 5(\cos(20) - \cos(20\cdot\sqrt{3})) \Rightarrow x_2(5) = 7.023
$$
Assume that the positive direction is rightward and the displacements of m {1}, m {2} are x {1},x {2} respectively. The derivative equation of motion of two objects; mx {1}'' = -kx {1} + k(x {2}-x {1}) => mx {1}'' + 2*kx {1} - kx {2} =0 (1) mx {2}'' = -kx {2} + k(x {1}-x {2}) => mx {2}'' + 2 kx_{2} - kx_{1} =0 (2) From (1) +(2) : m(x_{1} +x_{2})'' + k(x_{1}+x_{2}) = 0 at t=0, (x_{1} +x_{2})'=0 therefore x_{1} +x_{2}= (10+0) cos (\omega t) where 10,0 are the initial values of x {1} and x {2}; \omega= \sqrt{\frac{k}{m}} = 4 From ( 1) - (2) we get: m(x {1} -x {2})'' +3 k(x_{1}-x_{2}) = 0 at = 0: (x_{1} -x_{2})'=0 therefore x_{1} -x_{2} = 10 cos (4sqrt{3} t) Substitute t=5, we can figure out x {1} + x {2}, and x {1} -x {2} then figure out x_{2} = 7.023
Let x 1 be the displacement of m 1 from its equilibrium position, x 2 be the displacement of m 2 from its equilibrium position, x ˙ = d t d x , x ¨ = d t 2 d 2 x . By using Hooke’s Law, we can have two equations of motions:
m x ¨ 1 = k ( − 2 x 1 + x 2 ) ⟹ x ¨ 1 = − 3 2 x 1 + 1 6 x 2 m x ¨ 2 = k ( x 1 − 2 x 2 ) ⟹ x ¨ 2 = 1 6 x 1 − 3 2 x 2
Method 1:
By rearranging the equations above, we can get: x ¨ 2 = − 4 8 x 1 − 2 x ¨ 1
Differentiate the x ¨ 1 = − 3 2 x 1 + 1 6 x 2 w.r.t t , we get:
x 1 ( 4 ) = − 3 2 x ¨ 1 + 1 6 x ¨ 2 = − 3 2 x ¨ 1 + 1 6 ( − 4 8 x 1 − 2 x ¨ 1 ) ⟹ x 1 ( 4 ) + 6 4 x ¨ 1 + 7 6 8 x 1 = 0
By solving the characteristic equations like those of the second order linear homogeneous differential equations, we get four roots. The general equation is x 1 = c 1 sin 4 t + c 2 cos 4 t + c 3 sin 4 8 t + c 4 cos 4 8 t .
Sub this equation into x ¨ 1 = − 3 2 x 1 + 1 6 x 2 , we get:
x 2 = c 1 sin 4 t + c 2 cos 4 t − c 3 sin 4 8 t − c 4 cos 4 8 t .
The initial conditions are: x 1 ( 0 ) = 1 0 , x ˙ 1 ( 0 ) = 0 , x 2 ( 0 ) = 0 , x ˙ 2 ( 0 ) = 0
When we use the initial conditions, we get c 1 = 0 , c 2 = 5 , c 3 = 0 , c 4 = 5
x 2 = 5 cos 4 t − 5 cos 4 8 t
When t = 5 , x 2 = 7 . 0 2 3 c m
Method 2:
The two simultaneous differential equations can be solved by using eigenvector method.
( x ¨ 1 x ¨ 2 ) = ( − 3 2 1 6 1 6 − 3 2 ) ( x 1 x 2 )
There are two eigenvalues, λ 1 = − 1 6 and λ 2 = − 4 8 . For λ 1 , its eigenvector is ( 1 1 ) . For λ 2 , its eigenvector is ( 1 − 1 ) .
Thus the general solution is ( x 1 x 2 ) = ( 1 1 ) ( c 1 sin 4 t + c 2 cos 4 t ) + ( 1 − 1 ) ( c 3 sin 4 t + c 4 cos 4 t )
When we sub in the initial conditions, we get the same answer: at t = 5 , x 2 = 7 . 0 2 3 c m .
Method 3:
The coupled oscillators actually have two normal modes, and the x 1 and x 2 consists of the superposition of the two normal modes. One normal mode is when the two masses move in phase, i.e. the middle spring always keeps its original length (neither stretched nor compressed). In this case, x 1 = x 2 . When we sub this equation into x ¨ 1 = − 3 2 x 1 + 1 6 x 2 , we get x ¨ 1 = − 1 6 x 1 . This is the equation of simple harmonic motion, so in the first normal mode, ω = 4 .
The second normal mode corresponds to the situation where two masses are π radians out of phase, i.e. x 1 = − x 2 . When we sub this condition into the x ¨ 1 = − 3 2 x 1 + 1 6 x 2 , we get x ¨ 1 = − 4 8 x 1 and ω = 4 8 .
Hence x 1 is the superposition of the two modes and the general equation is x 1 = c 1 sin 4 t + c 2 cos 4 t + c 3 sin 4 8 t + c 4 cos 4 8 t . Since x 1 = x 2 for ω = 4 and x 1 = − x 2 for ω = 4 8 ,
x 2 = c 1 sin 4 t + c 2 cos 4 t − c 3 sin 4 8 t − c 4 cos 4 8 t
When we sub in the initial conditions, we get the answer: at t = 5 , x 2 = 7 . 0 2 3 c m