Cutting The Paraboloid
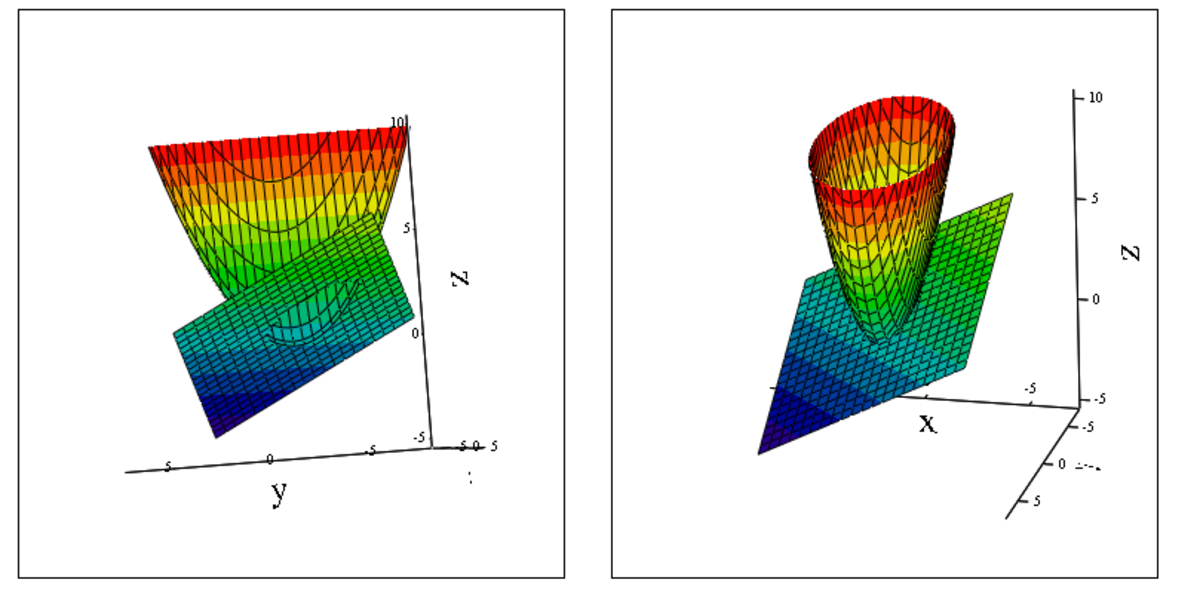
A paraboloid is given by z = x 2 + 4 1 y 2 .
A plane whose equation is x + y + 2 z = 2 cuts through it. The resulting intersection is an ellipse. Find the sum of the semi-minor and semi-major axes of the ellipse. Round your answer to three decimal places.
The answer is 3.825.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
I solved this problem in the "old-women" fashion, although I was very lucky in certain point. The first thing that I did was to get the
z
from the first equation and substitute it in the second one.
x
+
y
+
2
z
=
2
z
=
x
2
+
4
1
y
2
}
⇒
x
+
y
+
2
x
2
+
2
1
y
2
=
2
This is a quadratic equation. At this point we can't actualy know this is an ellipse, it may be a hyperbola or a parabola as well, or even a pair of lines. There is a method called "reduction of quadratics to their canonical form", which transforms this quadratic into a more familiar form of a conic. It can be rewritten as:
2
x
2
+
0
⋅
2
x
y
+
2
1
y
2
+
2
1
2
x
+
2
1
2
y
−
2
=
0
This one looks like this one:
a
1
1
x
2
+
a
1
2
2
x
y
+
a
2
2
y
2
+
a
1
0
2
x
+
a
2
0
2
y
−
a
0
0
=
0
Firstly we will apply the rotation to the quadratic. To determine the matrix of rotation the following matrix is formed:
A
=
(
a
1
1
a
1
2
a
1
2
a
2
2
)
=
(
2
0
0
2
1
)
Then the eigenvalues and eigenvectors of
A
are calculated. The unit vector of the eigenvectors will give the directions of the new coordinate system. For the eigenvalue
λ
1
=
2
the eigenvector is
v
1
=
(
1
0
)
. So its unit vector is
e
1
=
∥
v
1
∥
v
1
=
1
i
+
0
j
. Similarly the other unit vector is
e
2
=
0
i
+
1
j
. The matrix of rotation can be written now:
R
=
(
e
1
x
e
1
y
e
2
x
e
2
y
)
=
(
1
0
0
1
)
Now the substitution of variables is made:
(
x
y
)
=
R
(
x
′
y
′
)
⇒
x
=
x
′
y
=
y
′
Now the translation part comes. Here we form perfect squares and try to bring the cuadratic in a known form.
2
x
′
2
+
2
1
y
′
2
+
2
1
2
x
′
+
2
1
2
y
′
−
2
=
0
2
(
x
′
+
4
1
)
2
+
2
1
(
y
′
+
1
)
2
−
8
1
−
2
1
−
2
=
0
Making the substitution
X
=
x
′
+
4
1
and
Y
=
y
′
+
1
the shifted conic becomes:
2
X
2
+
2
1
Y
2
−
8
1
−
2
1
−
2
=
0
This is the same thing as:
(
1
6
2
1
)
2
X
2
+
(
4
2
1
)
2
Y
2
=
1
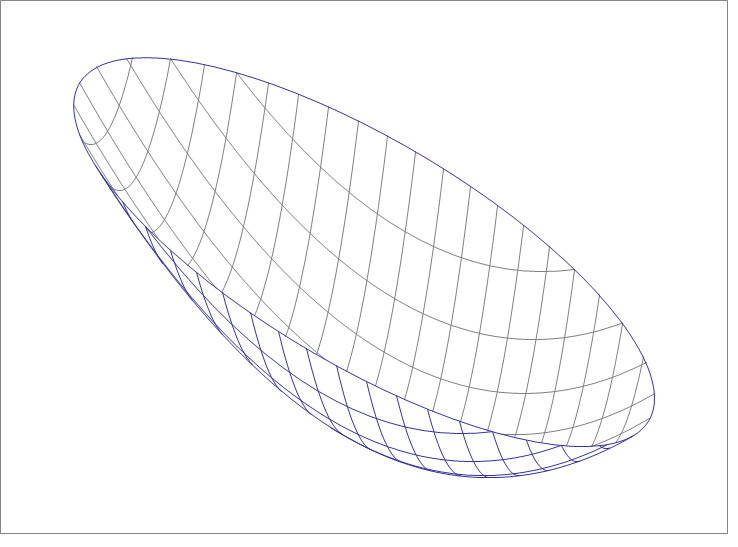
So here is what we did until now:
![]()
The thing is that this ellipse is the projection of the actual ellipse on the x O y plane. And now comes the tricky part were I got lucky: the ellipse has its minor and major axes parallel to the coordinate axes. So by taking the derivative in respect to x of the plane function we get − 0 . 5 . This means that the slope in x direction is − 0 . 5 . The same is in y direction. Now we can think at a right angle triangle with the length of base given (the minor and major axes of the projection conic) and with the ratio of the cathetus also given (the slopes in x and y direction). Basicaly we project this ellipse's major and minor axes back on the original inclined plane. The final answer is: S = 1 6 2 1 1 2 + 0 . 5 2 + 4 2 1 1 2 + 0 . 5 2 = 3 . 8 4 2 6 7
If the projected ellipse was rotated i would have tried to take some directional derivatives to calculate the back-projected lengths of major and minor axes. Fortunately I didn't have to do it.
The second part of your solution is incorrect. The axes you found in the first part are NOT projections of the axes of the actual ellipse which lies in the cutting plane. To complete your analysis, you have to project back each axis (one lies along the x-direction, and one along the y-direction) onto the cutting plane. These two projections are not orthogonal, and therefore, this reduces to finding the expression for the points of the ellipse on the cutting plane using these two projected vectors.
i.e.
r = ( x , y , z ) = r 0 + v 1 cos t + v 2 sin t
with r 0 = [ − 1 / 4 , − 1 , 1 3 / 8 ] T , v 1 = [ a , 0 , − a / 2 ] T , v 2 = [ 0 , b , − b / 2 ] T
where a = 2 1 / 1 6 , and b = 2 1 / 4
Therefore,
r − r 0 = [ v 1 , v 2 ] [ cos t , sin t ] T
Note that r − r 0 lies in the plane spanned by v 1 , v 2 . So, we'll construct an orthonormal basis (a coordinate frame) for this space using v 1 , v 2 . This can done using standard Gram-Schmidt orthogonalization. With the resulting basis being B = [ u 1 , u 2 ] , hence , with respect to this basis, we can write
r − r 0 = B [ x ′ , y ′ ] T = B G [ cos t , sin t ] T
where G = [g1 , g2] , is the representation of the two vectors in the basis B.
in particular, g 1 1 = v 1 ⋅ u 1 , g 2 1 = v 1 ⋅ u 2 , g 1 2 = v 2 ⋅ u 1 , g 2 2 = v 2 ⋅ u 2
This implies
r ′ = [ x ′ , y ′ ] T = G [ cos t , sin t ] T
Therefore, using [ cos t , sin t ] [ cos t , sin t ] T = 1
r ′ T G − T G − 1 r ′ = 1
Now , we can find a rotation matrix R and a diagonal matrix D such that
R T G − T G − 1 R = D
hence, by letting r ′ = R p
p T D p = 1
the diagonal elements are the reciprocal of the square of the semi-major and semi-minor axes of this ellipse.
The equation for the paraboloid is
z = a x 2 + b y 2
In matrix form, and by defining r = [ x , y , z ] T ,
r T A r + B T r = 0
where A = d i a g { a , b , 0 } , and B = [ 0 , 0 , − 1 ] T
Points on the cutting plane, can be expressed as
r = r 0 + V u
where r 0 , is any point on the plane, and V = [ v 1 , v 2 ] where v 1 , v 2 are any two unit vectors orthogonal to each other and to the normal to the plane.
Substituting this r into the equation of the paraboloid,
( r 0 + V u ) T A ( r 0 + V u ) + B T ( r 0 + V u ) = 0
Expanding,
r 0 T A r 0 + 2 r 0 T A V u + u T V T A V u + B T r 0 + B T V u = 0
Collecting terms
u T V T A V u + ( 2 r 0 T A V + B T V ) u = − r 0 T A r 0 − B T r 0
Completing the square,
( u − u 0 ) T V T A V ( u − u 0 ) = − r 0 T A r 0 − B T r 0 + u 0 T V T A V u 0
where u 0 = − 1 / 2 ( V T A V ) − 1 ( 2 r 0 T A V + B T V ) T
Since V T A V is a symmetric matrix, there exists a 2x2 rotation matrix R , and a 2x2 diagonal matrix D , such that
R T V T A V R = D
setting u = u 0 + R w , we get,
w T D w = c
with c = − r 0 T A r 0 − B T r 0 + u 0 T V T A V u 0
Finally, dividing by c, we get
w T E w = 1
where E = D / c
This is an equation of an ellipse with center r C = r 0 + V u 0 .
If E = d i a g { e 1 1 , e 2 2 } , then
the semi-major , and semi-minor axes lengths are
1 / e 1 1 , 1 / e 2 2
(Not necessarily in this order)
Performing the necessary calculations results in the following semi-major and semi-minor axes:
M = 2 . 5 7 8 4 6 8
m = 1 . 2 4 6 8 4 7
Hence the answer is M + m = 3 . 8 2 5