Drag & Friction - Part 2
The first part : Drag & Friction
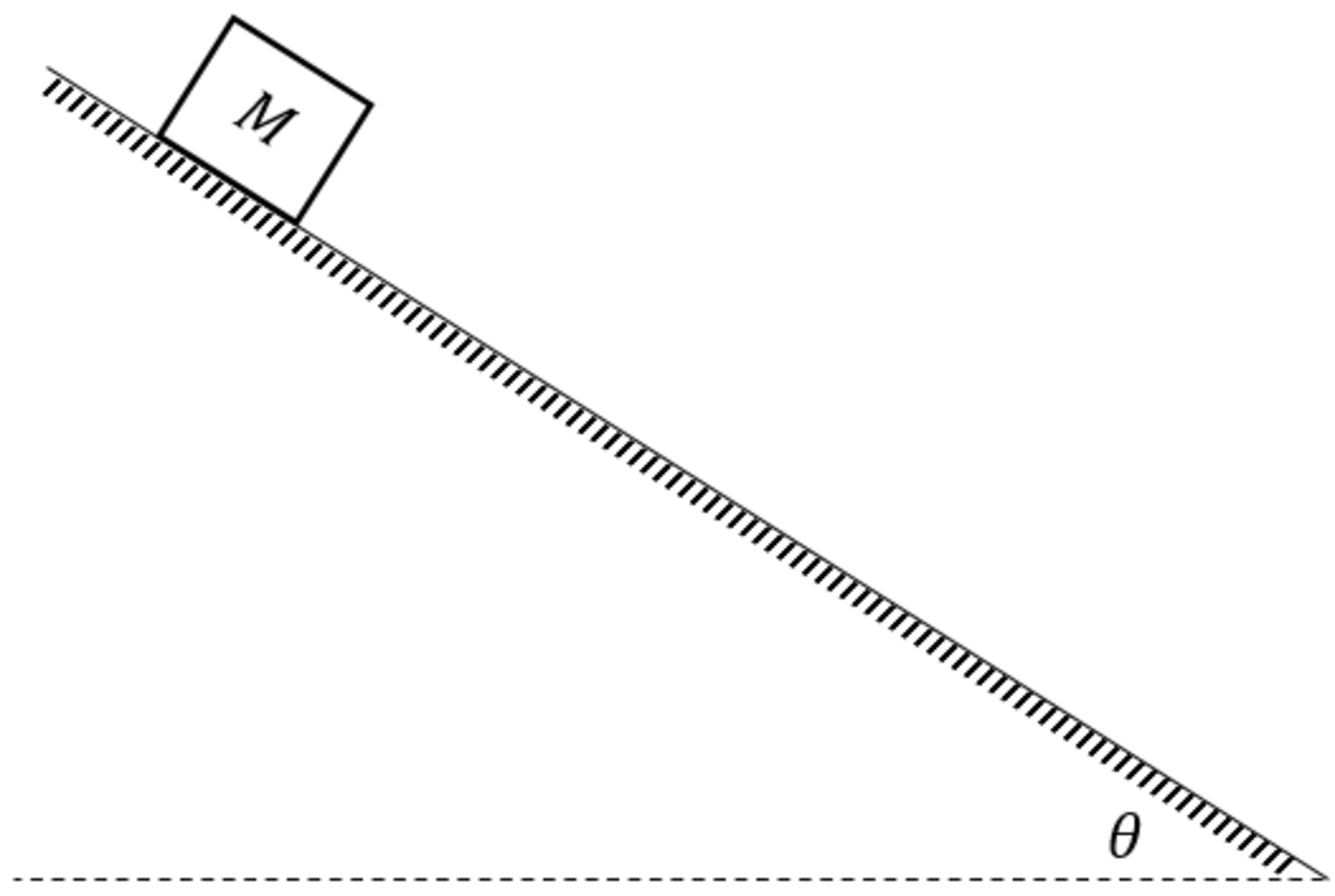
An object of mass M is placed on an inclined plane with friction coefficient μ as shown on the figure. The object is then given an initial speed of v 0 parallel to the plane. On its subsequent motion, the object also experiences a drag force, F ( v ) , that satisfies :
F ( v ) = − b v
The object starts at the height of H . After a very long time, the speed of the object is v s s .
When the speed of object is 8 5 v s s , the object is at height α H
What is α ? (Round to the nearest thousandths)
Details and Assumptions :
-
Assume that the inclined plane is long enough for the object to reach terminal velocity
-
M = 1 k g
-
θ = 3 0 o
-
b = 0 . 5 k g / s
-
μ = 5 3
-
g = 1 0 m / s 2
-
v 0 = 1 m / s
-
H = 1 0 0 m
The answer is 0.987.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
Summary of Steps:
-
Derive Equation of Motion
-
Solve for the velocity v of the object w.r.t time
-
Find the time T taken to reach the desired speed
-
Solve for the position x of the object w.r.t to time
-
evaluate x ( T )
-
Determine α
See free body diagram for an illustration of the forces acting on the body.
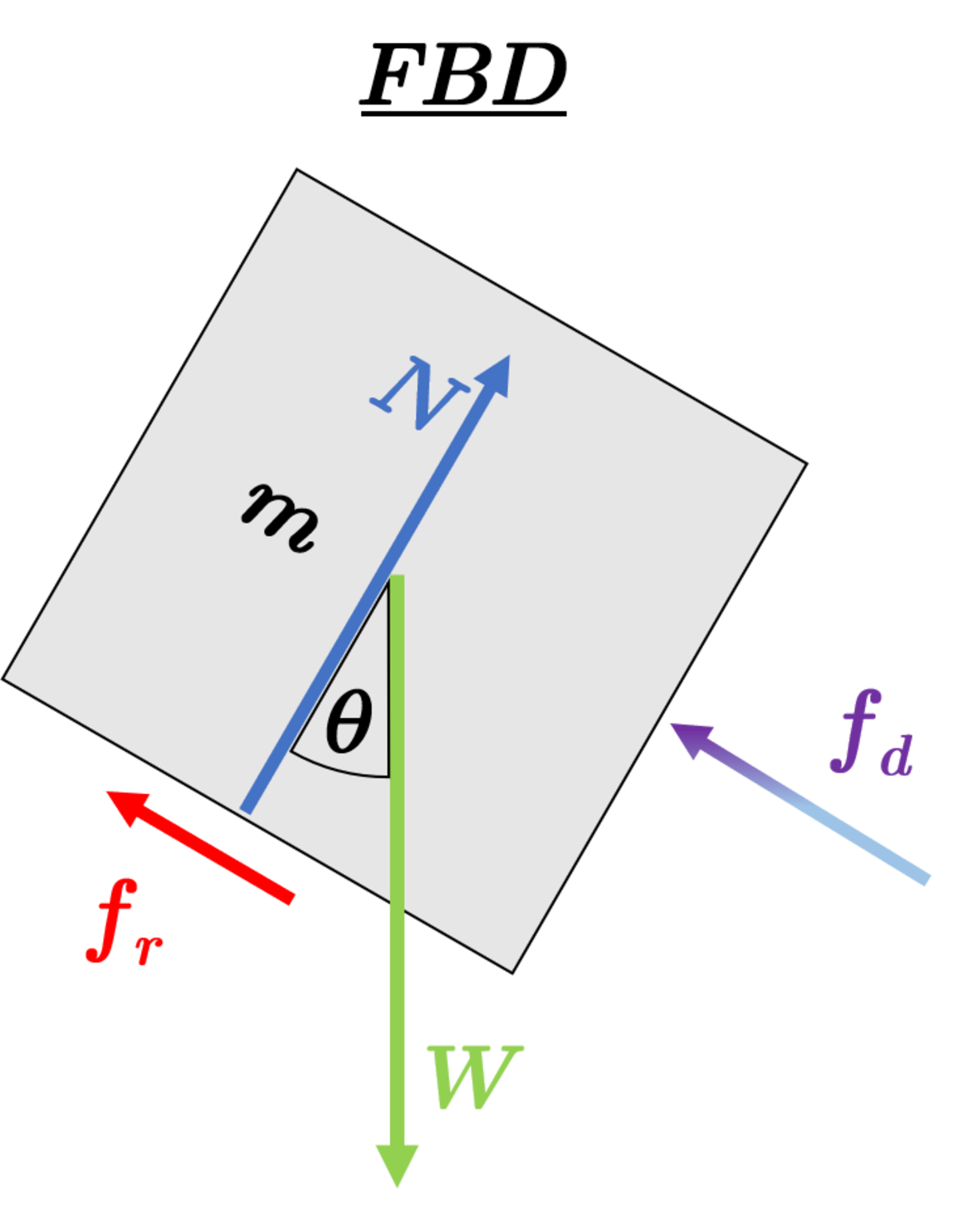
We can use Newtons Second Law to Derrive the equations of motion
∑ F x = m d t d v = m g sin θ − μ m g cos θ − b v
Dividing through by the mass of the body m :
d t d v = g ( sin θ − μ cos θ ) − m b v
Introduce new constants β and τ to clean up the differential equation:
β = g ( sin θ − μ cos θ )
τ = b m
The resulting First Order Non-Homogeneous Linear ODE is as follows:
d t d v = β − τ 1 v
One method to solve the above equation is shown below:
Let
φ = β − τ 1 v
Then differentiating φ w.r.t v
d v d φ = − τ 1
Using the Chain Rule:
d t d φ = d v d φ d t d v = − τ 1 φ
We now have reduced the differential equation to type to Seprable.
The solution in terms of φ is as follows:
φ o φ f = e τ − t
Switching variables back to velocity v :
v ( t ) = ( v o − τ β ) e τ − t + τ β
Now we can determine the steady state solution ( terminal velocity ):
v s s = t → ∞ lim v ( t ) = τ β
Now we can solve for the time T to reach the target velocity in terms of v s s
8 5 v s s = 8 5 τ β = ( v o − τ β ) e τ − t + τ β
T = − τ ln ( 8 3 ( τ β − v o ) τ β )
Now, find the position x ( t ) by intgrating v ( t ) w.r.t. t :
x ( t ) = ∫ v ( t ) d t = ∫ ( ( v o − τ β ) e τ − t + τ β ) d t = τ ( β t − ( τ β − v o ) ( 1 − e τ − t ) )
Now we can substitute the time T taken to reach 8 5 v s s :
x ( T ) = τ ( v o + τ β ( ln ( 3 8 τ β ( τ β − v o ) ) − 8 5 ) ) ≈ 2 . 5 4 5 m
Finally , we can deterermin α ( the fraction of the initial height H ) to be:
α = 1 − H x ( T ) sin θ ≈ 0 . 9 8 7
Referring to the first part's solution ( https://brilliant.org/problems/drag-friction/?ref_id=1608702 ):
v ( t ) = b m g ( sin θ − μ cos θ ) ( 1 − e − m b t ) + v 0 e − m b t
Substituting numerical values :
v ( t ) = 4 − 3 e − 2 1 t
v s s = 4 m / s 8 5 v s s = 2 . 5 m / s
Substitute the speed to v ( t )
4 − 3 e − 2 1 t = 2 . 5
t = 2 ln 2
Integrate v ( t ) to get the distance s covered by the object :
s = ∫ 0 2 ln 2 ( 4 − 3 e − 2 1 t ) d t = 4 ( 2 ln 2 ) + 6 e − ln 2 − 0 − 6 = 8 ln 2 − 3
Look at the figure below :
Notice that :
s sin θ = ( 1 − α ) H
α = 1 − H s sin θ = 1 − 1 0 0 0 . 5 ( 8 ln 2 − 3 ) ≈ 1 − 0 . 0 1 2 7 2 5 = 0 . 9 8 7 2 7 5 ≈ 0 . 9 8 7
Therefore,
α = 0 . 9 8 7