Drag & Friction
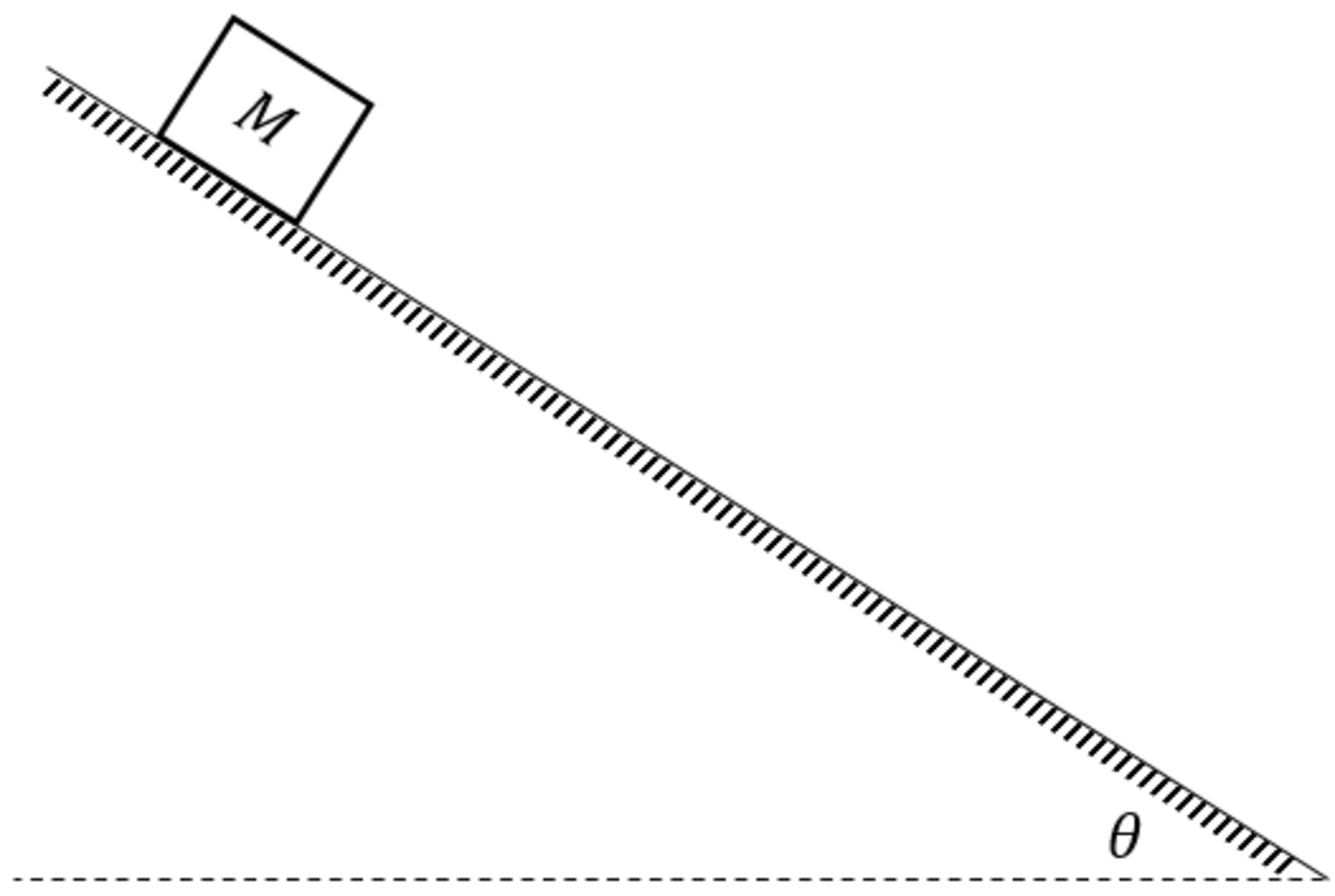
An object of mass M is placed on an inclined plane with friction coefficient μ as shown on the figure. The object is then given an initial speed of v 0 parallel to the plane. On its subsequent motion, the object also experiences a drag force, F ( v ) , that satisfies :
F ( v ) = − b v
After a very long time, what is the speed of the object? (in m / s )
Details and Assumptions :
-
Assume that the inclined plane is very long
-
M = 1 k g
-
θ = 3 0 o
-
b = 0 . 5 k g / s
-
μ = 5 3
-
g = 1 0 m / s 2
The answer is 4.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
Nice, i should've remembered this method earlier.
Log in to reply
It would be fun to solve a problem like this that focuses on the dynamics that occur before steady state
Oh god it was so simple! I legit tried solving the differential equation 😂
Log in to reply
I know right! I forgot this method.
I will also post another version of this problem soon, stay tune.
This method is so simple, I like it! And it is analogous of the free fall with drag. I solved the ODE, but just because I need to practice it more haha And your solution is kind of a consequence of the solution for the ODE.
The free body diagram of the system :
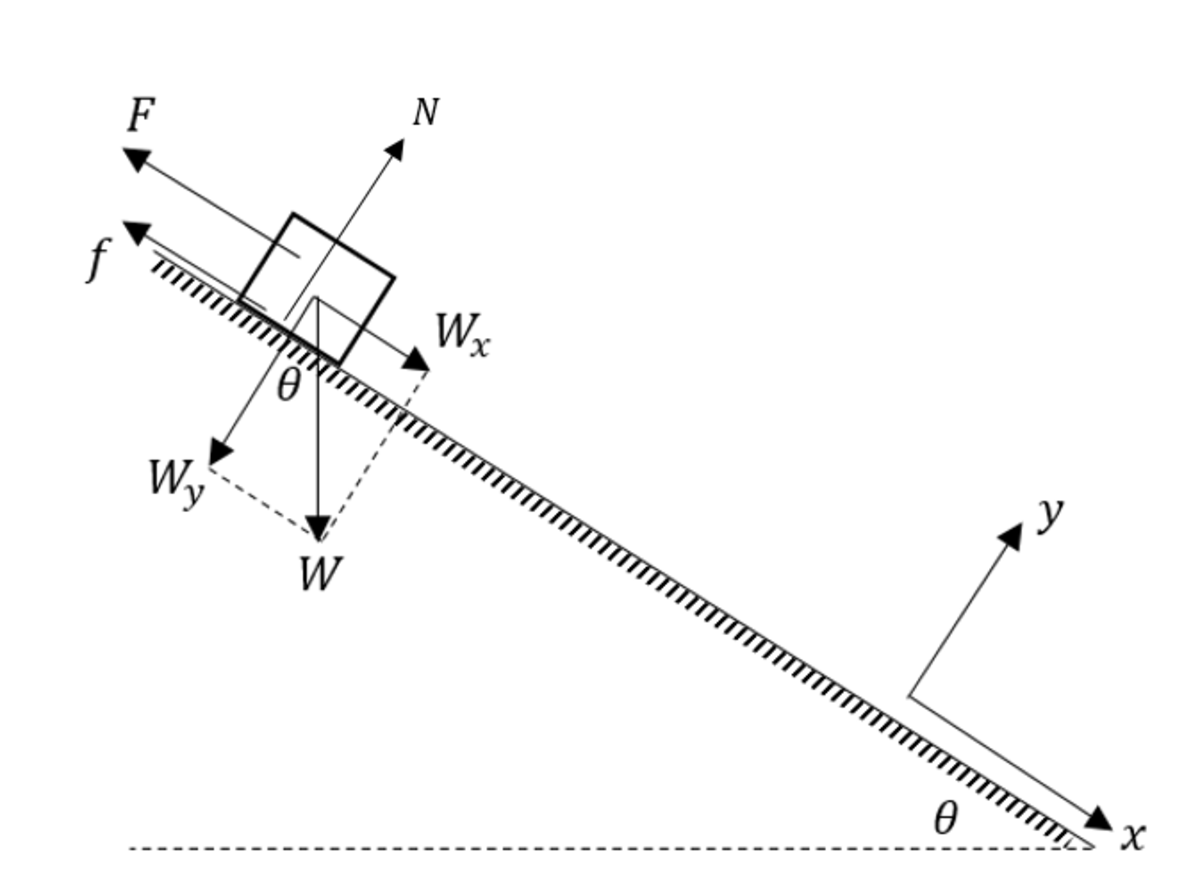
Where :
W x = m g sin θ
N = W y = m g cos θ
f = μ N = μ m g cos θ
Newton's 2 n d law along the x axis :
m g sin θ − μ m g cos θ − b v = m x ¨
m g ( sin θ − μ cos θ ) − b v = m x ¨
Divide both sides with m and let ( sin θ − μ cos θ ) g = A to simplify calculations,
A − m b v = v ˙
Move − m b v to the right side and multiply both sides with the integrating factor e ∫ m b d t = e m b t , resulting in :
A e m b t = d t d ( v e m b t )
Integrate both sides,
b m A e m b t + C = v e m b t
Substitute t = 0 and v = v 0 to get C = v 0 − b m A
Multiply both sides by e − m b t ,
b m A + v 0 e − m b t − b m A e − m b t = v
v = b m A ( 1 − e − m b t ) + v 0 e − m b t
Substitute A to get :
v ( t ) = b m g ( sin θ − μ cos θ ) ( 1 − e − m b t ) + v 0 e − m b t
Take the limit t → ∞ to get :
v = b m g ( sin θ − μ cos θ )
Substitute the numerical values to get :
v = 4 m / s
Nice! I did it the same way! Solving the ODE is not the simplest method, but I like to see the full equation of motion in the end. It give us the feeling of what is happening in the problem. The decaying exponential is something we might expect when the speed comes to a hold at some time in the future. And the shape of the curve approaches the no drag situation when the mass is very large or the drag is very small.
Set the accelerating force equal to the retarding force to solve for the steady state velocity:
m g sin ( θ ) = μ m g cos θ + b v s s v s s = b m g sin ( θ ) − μ m g cos θ