Dragging a Rod
A uniform rod of unit length is on a flat, horizontal surface, supported at its two ends. The friction force is the same all over the surface. One end of the rod is pulled by a horizontal force, slowly and steadily, in a direction perpendicular to the original direction of the rod, along the black line in the illustration.
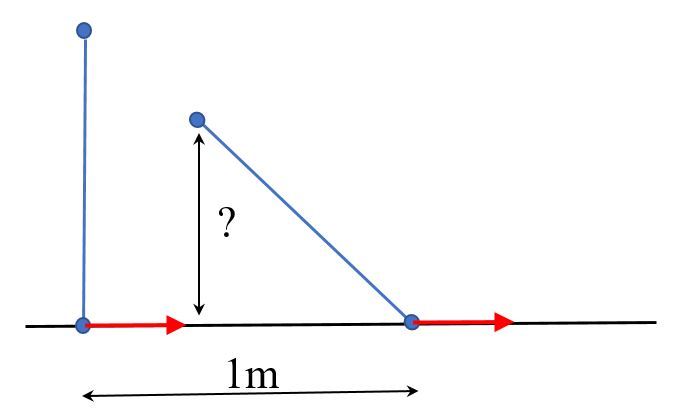
What will be the distance between the freely moving end of the rod and the black line when the pulled end of the rod is a unit distance from the starting point?
See also similar problems by Steven Chase and by Digvijay Singh .
The answer is 0.648.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
The pulled end of the rod will move with constant velocity, and its coordinates will be x 1 = v 0 t and y 1 = 0 , where ℓ is the length of the rod. For the rest of the discussion we will assume the v 0 → 0 limit i.e. the motion is "slow and steady".
The free end has coordinates of x 2 = ℓ cos α + x 1 and y 2 = ℓ sin α , where α is the angle between the rod and the black line. Taking the time derivative and using ω = α ˙ , v x = x ˙ 2 , v y = y ˙ 2 we get
v x = − ω ℓ sin α + v 0 , v y = ω ℓ cos α
The velocity of the free end makes an angle β to the reference line so that sin β = v y / v and cos β = v x / v , where v = v x 2 + v y 2 The magnitude of the friction force is constant, F . The direction of the friction force is opposite to the velocity:
F x = − F cos β , F y = − F sin β
For the equation of motion we need to look at the torque acting on the rod and make it equal to zero. Using the pulled end as the axis of rotation, we get
F x ℓ sin α = F y ℓ cos α
Inserting the friction force and the velocity expressed before, we get
( − v 0 ω ℓ sin α + 1 ) sin α = v 0 ω ℓ cos 2 α
or
sin α = v 0 ω ℓ = v 0 α ˙ ℓ
This is a first order differential equation, that can be solved by separation of variables:
ℓ v 0 d t = sin α d α
The integration yields
ℓ v 0 t = lo g ( tan α / 2 ) + c o n s t
The time is related to the position of the pulled end by t = x / v 0 , therefore
ℓ x = lo g ( tan α / 2 ) + c o n s t
It turns out that if const =0 then at x = 0 we have α = 9 0 ∘ . When x = ℓ , we get tan α / 2 = e , and we can solve that for α . Recalling that y 2 = ℓ sin α we get y 2 = 0 . 6 4 8
Ivo Zerkov (see below) pointed out that the response can be written in the form of 1 + e 2 2 e .
The red curve below shows the position of the top of the rod as the bottom is pulled. A few instances of the positions of the full rod are also shown.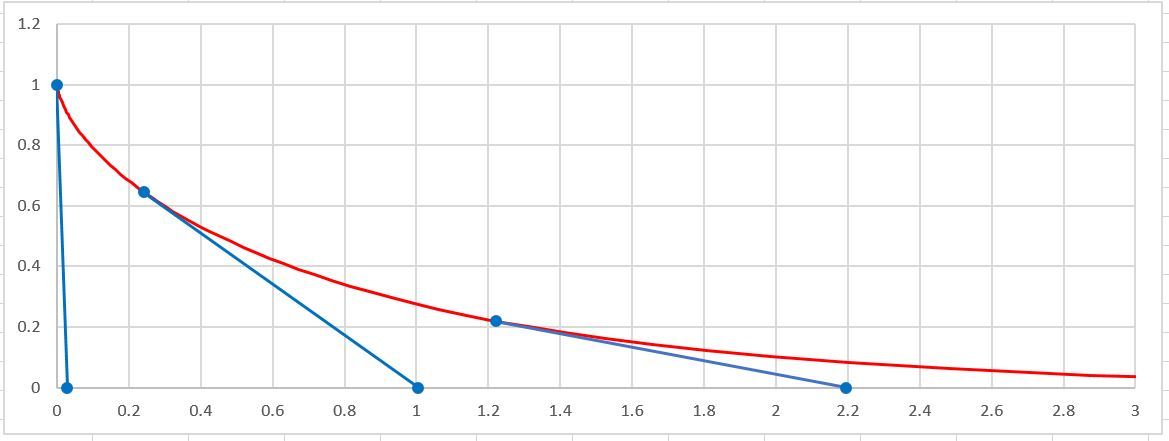
Notes:
The motion is reversible. If we start with a rod that is nearly parallel to the reference line, and pull it backwards, the free end will follow the same curve.
One of the consequences of the torque equation is that α = β . The motion of the end point of the rod is parallel to the rod, just as in this problem
It is not necessary to require that the friction is the same everywhere. As long as the friction is isotropic (independent of the direction of motion) the result is the same.