Flying Over a Rod
At time t = 0 , a particle of mass M = 1 kg is launched with the following position and velocity:
( x , y ) = ( − 2 , 0 ) m ( x ˙ , y ˙ ) = ( 1 . 2 , 1 . 2 ) m/s
There is a rod which spans from ( x , y ) = ( − 1 , 0 ) to ( x , y ) = ( 1 , 0 ) . The rod is fixed in place, and it has a mass density of 1 kg/m .
At what time does the particle reach y = 0 again?
Details and Assumptions:
1)
The only gravity acting on the particle is from the rod. Gravitational constant
G
=
1
kg
s
2
m
3
2)
We are interested in the lowest value of
t
such that
t
>
0
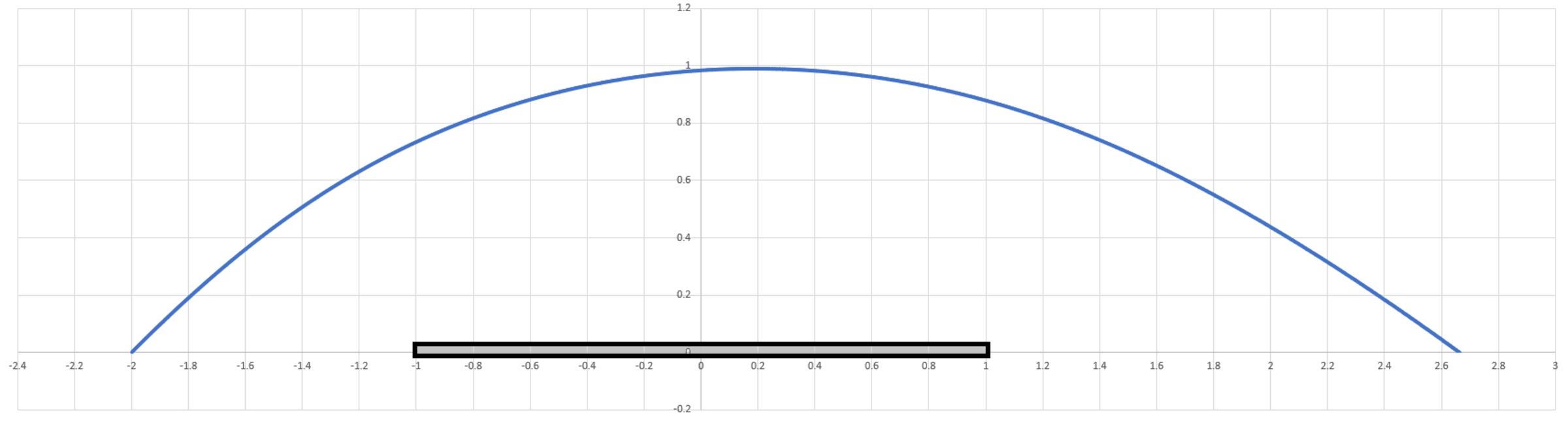
The answer is 2.77.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
At a general time t , let the position of the point mass be r P = ( x , y , 0 ) and consider a rod element of length d p near the point r L = ( p , 0 , 0 ) . Then, applying Newton's law of gravitation, the force on the point mass is:
d F = ∣ r L − r P ∣ 3 G M d p ( r L − r P )
Then:
F = ∫ − 1 1 ∣ r L − r P ∣ 3 G M ( r L − r P ) d p
Applying Newton's second law, the acceleration vector of the point mass is:
a = ( a x , a y , 0 ) = M F
Finally the resulting system of differential equations governing the motion of the point mass is:
x ¨ = a x ; x ˙ ( 0 ) = 1 . 2 ; x ( 0 ) = − 2 y ¨ = a y ; y ˙ ( 0 ) = 1 . 2 ; y ( 0 ) = 0
This problem has been handled numerically as follows:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 |
|
The gravitational potential of the bar, with line mass density λ , is V ( x , y ) = − G ∫ − 1 1 ( u − x ) 2 + y 2 λ d u = − G λ [ sinh − 1 ( y u − x ) ] − 1 1 = − G λ [ sinh − 1 ( y 1 − x ) + sinh − 1 ( y x + 1 ) ] = G λ ln ( x + 1 + ( x + 1 ) 2 + y 2 x − 1 + ( x − 1 ) 2 + y 2 ) and the particle will satisfy the equations of motion x ¨ = − ∂ x ∂ V y ¨ = − ∂ y ∂ V together with the boundary conditions x ( 0 ) = − 2 , y ( 0 ) = 0 , x ˙ ( 0 ) = y ˙ ( 0 ) = 1 . 2 .
Manipulating the derivatives of V so that they are not explicitly singular when y = 0 , we obtain the equations (with G = 1 and λ = 1 ): x ¨ y ¨ = ( x + 1 ) 2 + y 2 1 − ( x − 1 ) 2 + y 2 1 = − ( x + 1 ) 2 + y 2 ( x − 1 ) 2 + y 2 [ ( x + 1 ) ( x − 1 ) 2 + y 2 + ( x − 1 ) ( x + 1 ) 2 + y 2 ] 4 x y These differential equations can be solved numerically, together with their initial conditions, and we obtain that y = 0 when t = 2 . 7 6 5 1 7 0 4 5 5 8 .