An inelastic projectile
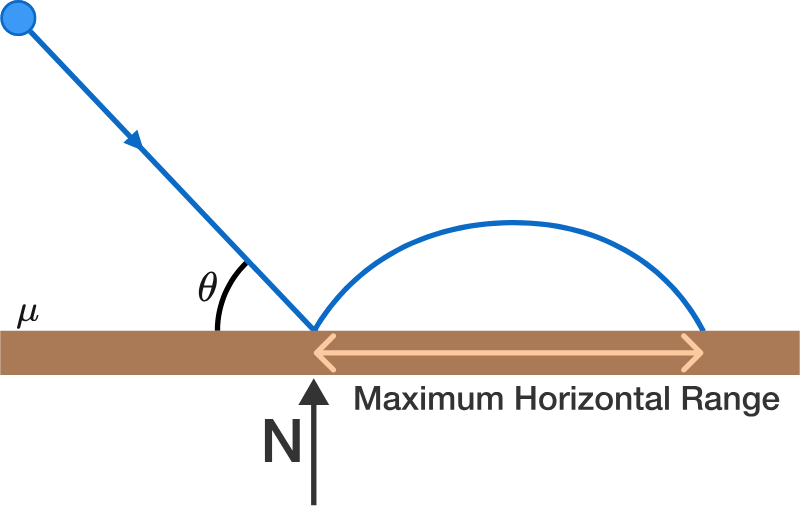
A small ball undergoes a partially elastic collision with a rough horizontal surface. Assume that friction f = μ N during the contact period, where N is the normal reaction and μ is the coefficient of friction.
Find the value of the incoming angle θ (in degrees) such that the horizontal range of the ball after hitting the surface is maximized.
Details and Assumptions:
- Take the coefficient of friction μ = 3 1 .
- Take the coefficient of restitution e = 3 − 1 .
Inspired from Rajdeep Brahma
The answer is 22.5.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
Maybe I misunderstand but doesn't the coefficient of restitution apply to the magnitude of the velocity, not just the vertical component? This may be a failing of my interpretation.
If this is the case, maximizing the horizontal range is independent of velocity and only depends on the outgoing angle. The range is then maximized when that angle is 45 degrees. Similar calculations to yours involving the impulse then leads to the solution of 15 degrees for the incoming angle.
Log in to reply
The coefficient of restitution only applies to the normal component of velocity. In a smooth collision, therefore, the tangential component of velocity remains unchanged, but the normal component is adjusted by the CoR. In a rough collision, the CoR determines the change in normal velocity, and hence the normal impulse applied. Friction must be limiting in a collision, and so the tangential impulse is thus determined, and hence the change in tangential velocity can be calculated.
Even I thought the same ,but yeah, it doesn't apply to the horizontal component.
How was the question sir?
i hope may be you are going wrong untill unless u mention that ball is rotating and with what angular velocity this friction direction can not be predicted?? correct me where ever required
Log in to reply
The question does not state it, but it is being assumed that the ball is not spinning (there is another question on this site where a ball bounces with topspin, in which case the frictional impulse would increase the horizontal velocity, and thereby increase the range).
COR ranges 0-1..!..keith
Same way. I have tested 3 times to get the correct answer... Also, the CoR and CoF are perfectly designed.
The smaller the angle , the more horizontal bounce. So, the smallest angle possible would be the answer. Think of skipping a stone across a quiet pond. If the angle is large, the stone either bounces a smaller distance or sinks. If the angle when throwing the stone(flat stone) is small, the stone 'skips' farther.
Log in to reply
Yeah!! Exactly sir! Nice observation. I also thought it just right now! Thanks :)
Could you please help me to understand how everything works after you get to the R(theta) part? I can't follow the trig where you began to use tangent. I assume you are setting a derivative equal to zero and that value of a tangent function satisfies that? I just don't know the identities and would like to understand the algebra there.
That's how I did it. Of course, I dropped the constants and used the function f instead, which is what you put into square brackets. f has the maximum at the same point as R.
There is an issue though, a technicality (or two).
At some angle the ball will be horizontally stopped. That is at angle $M$ where $\cos(M)-\mu(1+e)sin(M)$ equals zero. That angle is less than 90° when friction is greater than 0. With given $e$ and $\mu$ it's 45°. Greater angle won't cause the friction to make the ball go backwards, in other words, W won't be negative, it will still be zero for $\theta>M$.
The other thing is, before you go to derivatives, you need to be aware of a few things: f (or R) is 0 at $\theta=$0 and at $\theta\geq M$. Between 0 and M it is positive. It is continuous, so it has a maximum. It is smooth, so the derivative at the point of maximum is 0. Now you calculate the derivative, and as it is 0 only in one point, that one is the maximum.
where does tan2(theta) come from and why must it equal 1?
Log in to reply
Actually for minima/maxima, the derivative of the expression is made 0 which in turn gives tan 2 θ = μ ( 1 + e ) 1
Now putting e & \mu value, it gives tan 2 θ = 1 ⟹ 2 θ = 4 π ⟹ 8 π
Relevant wiki: 2D Kinematics Problem-solving
Let v be the initial velocity and v ′ the velocity after the bounce.
Coefficient of restitution implies ( 1 ) v y ′ = − e v y . Friction coefficient implies a relationship between horizontal and vertical impulses, and therefore between changes in momentum: Δ p x = e Δ p y . Therefore ( 2 ) v x − v x ′ = μ ( v y − v y ′ ) . Combining this, we have ( 3 ) v x ′ = v x − μ v y ( 1 + e ) . The range after the bounce is ( 4 ) R = g 2 v x ′ v y ′ ∝ v x ′ v y ′ . Combine with (1) and (3) to find ( 5 ) R ∝ ( v x − μ v y ( 1 + e ) ) e v y . Assuming that the initial speed is fixed, use v x = v cos θ and v y = v sin θ . We also divide out the constants v 2 and e : ( 6 ) R ∝ ( cos θ − μ sin θ ( 1 + e ) ) sin θ . To maximize this, consider where its derivative would become zero. ( 7 ) R ′ ∝ ( cos 2 θ − sin 2 θ ) − 2 μ ( 1 + e ) sin θ cos θ = 0 . This simplifies as ( 8 ) R ′ ∝ cos 2 θ − μ ( 1 + e ) sin 2 θ = 0 , so that ( 9 ) tan 2 θ = cos 2 θ sin 2 θ = μ ( 1 + e ) 1 . With the given values, the last expression becomes 1, implying that ( 1 0 ) 2 θ = 4 5 ∘ ∴ θ = 2 2 2 1 ∘ .
Can you refresh me on step 4? I am familiar with projectile motion and such, but I forget some of the steps and identities. How do we obtain the equation for the range?
Log in to reply
When the projectile lands, its vertical velocity component is precisely the opposite of what it was initially: v y = − v y 0 . At the same time, we have v y = v y 0 − g t , so that − v y 0 = v y 0 − g t ∴ t = g 2 v y 0 . This is the air time of the projectile. During this time, the horizontal distance traveled is R = Δ x = v x 0 t = v x 0 g 2 v y 0 = g 2 v x 0 v y 0 . (Frequently this is rewritten as R = v 2 / g sin 2 θ , where θ is the launch angle.)
May I also ask how you get from Step 6 to Step 7? I don't see what is happening with the Trig identities
Log in to reply
Sure. I took derivatives. The two terms are cos θ sin θ and μ ( 1 + e ) sin 2 θ .
For the first, use the product rule: D ( cos θ sin θ ) = cos θ ( D sin θ ) + ( D cos θ ) sin θ = cos θ cos θ + ( − sin θ ) ( sin θ ) = cos 2 θ − sin 2 θ . For the second, use the chain rule with f ( u ) = u 2 and u ( θ ) = sin θ : D ( f ( u ( θ ) ) = D f ( u ) ⋅ D g ( θ ) = 2 u ⋅ cos θ = 2 sin θ ⋅ cos θ .
From step 7 to step 8, I used the familiar identities cos 2 x − sin 2 x = cos 2 x and 2 cos x sin x = sin 2 x .
Log in to reply
ahhhh, it all makes beautiful sense now! thank you, again!
Relevant wiki: Friction
Before the collision, the ball has velocity ( − V sin θ V cos θ ) . After the collision, it has velocity ( e V sin θ W ) . Suppose that the ball has mass m . During the collision, the ball receives a normal impulse I N and a horizontal frictional impulse I F = μ I N .
Considering the vertical motion, it follows that I N = m ( 1 + e ) V sin θ , and hence I F = m μ ( 1 + e ) V sin θ . Thus it follows that W = V cos θ − μ ( 1 + e ) V sin θ .
After the collision, the flight time is g 2 e V sin θ , and so the post-impact range is R ( θ ) = g 2 e V sin θ × W = g e V 2 [ sin 2 θ − 2 μ ( 1 + e ) sin 2 θ ] Thus R ′ ( θ ) = g 2 e V 2 [ cos 2 θ − μ ( 1 + e ) sin 2 θ ] and hence R ( θ ) is maximised when tan 2 θ = μ ( 1 + e ) 1 = 1 , so that 2 θ = 4 5 ∘ , and hence θ = 2 2 . 5 ∘ .