Hamiltonian Mechanics - The Pendulum
This is a guided exercise on Hamiltonian mechanics. One does NOT need any extra or advanced knowledge of mechanics to solve this problem.
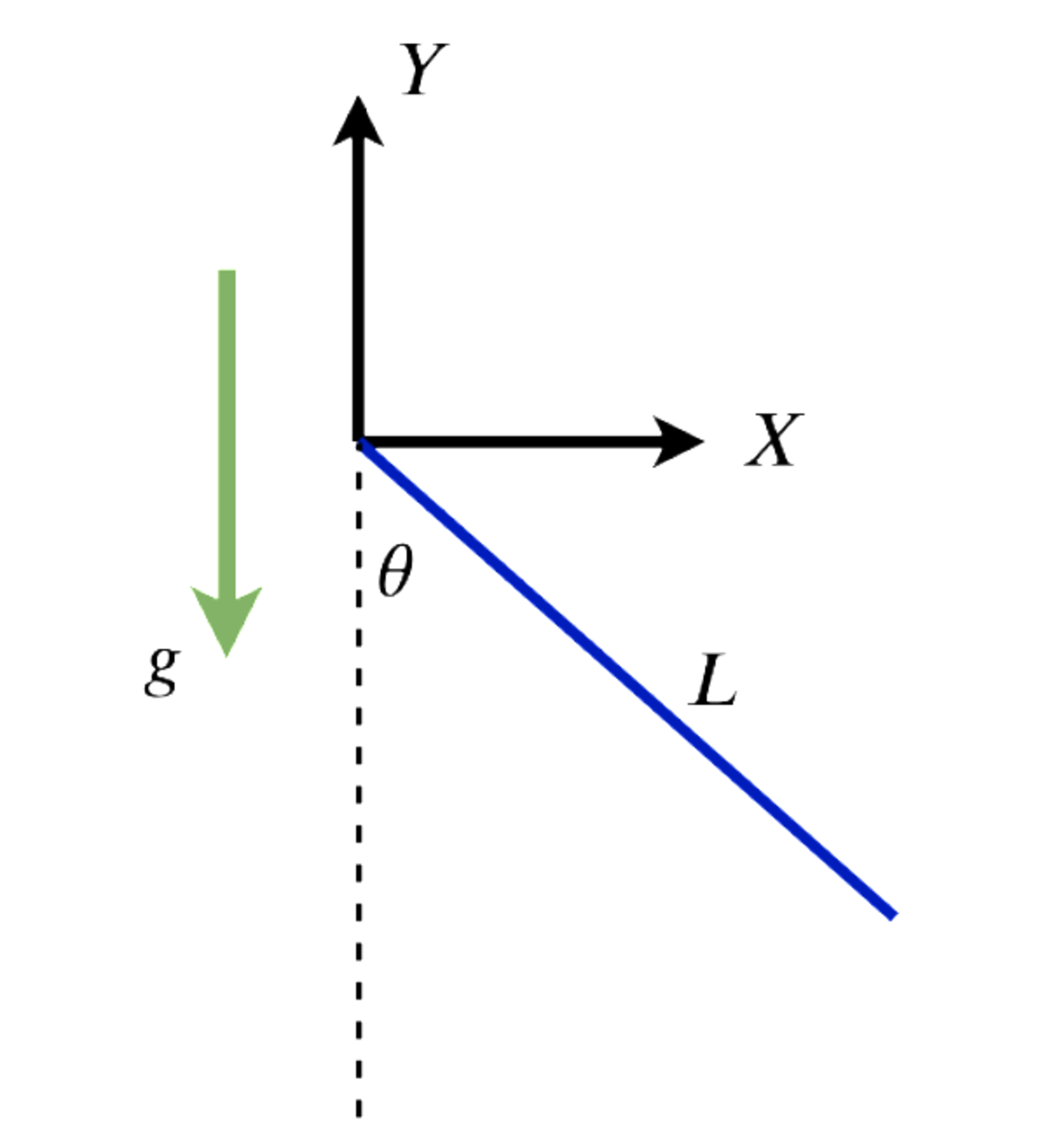
Consider a pendulum as shown in the figure. The rigid uniform rod which is hinged at the origin is free to rotate about the Z-axis due to ambient gravity. The mass of the rod is and its length is . Perform the following steps:
Step - 1:
At any general configuration, compute the Lagrangian of this system. The Lagrangian is defined as the difference between the system's kinetic energy ( ) and potential energy ( ).
If the angular velocity of the rod at a general instant is , then compute:
The quantity is known as the generalised momentum, which will result to be a function of . What does this quantity physically mean for this system?
Step - 2:
After computing the generalised momentum, compute the following quantity which is henceforth referred to as the Hamiltonian ( ):
Express the Hamiltonian purely as a function of and . What does the Hamiltonian physically mean?
Step - 3:
Calculate the equations of motion as such:
One should obtain a set of two ODEs.
Step - 4:
Finally, use the pair of resulting ODEs to solve for as a function of . Consider that the pendulum is released from rest from an angular position . The resulting expression will look as such:
Here, , , and are positive integers and and are co-prime. Compute .
Bonus: Interpret the final expression. Is there an easier way to derive it?
The answer is 18.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
Lagrangian:
T = 2 1 I θ ˙ 2 = 2 1 3 1 m L 2 θ ˙ 2 = 6 1 m L 2 θ ˙ 2 V = − m g 2 L cos θ L = T − V = 6 1 m L 2 θ ˙ 2 + 2 1 m g L cos θ
Generalized momentum. This ends up being equal to I θ ˙ , which is the rotational analog of linear momentum.
p = ∂ θ ˙ ∂ L = 3 1 m L 2 θ ˙ = I θ ˙ θ ˙ = m L 2 3 p
Hamiltonian. This ends up being equal to the total energy of the system (kinetic plus potential):
H = p θ ˙ − L = p θ ˙ − 6 1 m L 2 θ ˙ 2 − 2 1 m g L cos θ = p m L 2 3 p − 6 1 m L 2 m 2 L 4 9 p 2 − 2 1 m g L cos θ = m L 2 3 p 2 − 2 m L 2 3 p 2 − 2 1 m g L cos θ = 2 m L 2 3 p 2 − 2 1 m g L cos θ
Equations of motion:
θ ˙ = ∂ p ∂ H = m L 2 3 p p ˙ = − ∂ θ ∂ H = − 2 1 m g L sin θ
Re-arranging equations of motion:
d θ d p = θ ˙ p ˙ = − 2 1 m g L sin θ 3 p m L 2 p d p = − 6 1 m 2 L 3 g sin θ d θ
Integrating both sides:
∫ 0 p p d p = − 6 1 m 2 L 3 g ∫ θ 0 θ sin θ d θ 2 p 2 = − 6 1 m 2 L 3 g ( − cos θ + cos θ 0 ) p 2 = 3 1 m 2 L 3 g ( cos θ − cos θ 0 ) = I 2 θ ˙ 2
The end result is essentially an energy conservation expression. The pendulum trades angle (and thus potential energy) for speed as it moves.