Help Sally Crash Into Her Father
Sally is a very bad skater, so she can only skate in one direction! But Sally still wants to find her dad in the least amount of moves possible so that she can get off the ice. Sally's only way of stopping is (crashing into) walls or the edge of the ice rink.
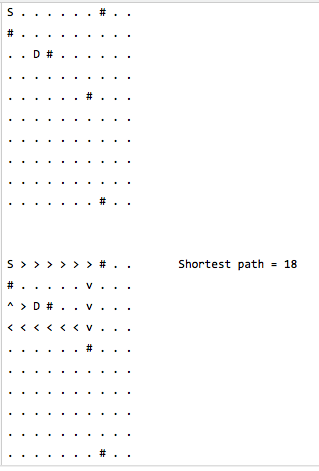
We describe the ice rink using the following notation:
(#) -- Wall
(.) -- Free space
(S) -- Sally's starting position
(D) -- Dad's position.
For example, in the ice rink at right, the shortest path is 18 steps.
Here is a text file of 5 ice rinks of size . The rinks are separated by hyphens.
Find the sum of the shortest paths of these five ice rinks.
Note: Sally has to stop at her father's position. She will slide past him if there are no walls.
Image credit: Flickr Saad Akhtar
The answer is 232.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
Sally's Journey can be modeled as a weighted directed graph,where the walls and the edges of the rink are nodes of the graph and the edges are the distances between two nodes.Basically a weighted graph is a graph that associates a label (weight) with every edge in the graph. For example the graph of the given example above(the 1 0 × 1 0 grid in the problem description) is the following graph graph
.
graph
.
Finding the shortest possible path in a weighted graph can be done with Dijkstra's algorithm (a more generalized version of A* search). It picks the unvisited node with the lowest-distance, calculates the distance through it to each unvisited neighbor, and updates the neighbor's distance if smaller. Mark visited (set to red) when done with neighbors. Dijkstra's algorithm
Dijkstra's algorithm
Thank's to Chandler's solution here . I learned about an awesome tool named networkx for managing graphs in python.
Here is the code in python: