Hunting Red October with echolocation
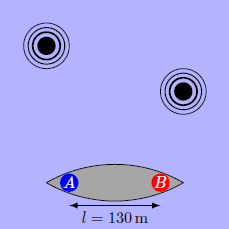
A submarine lies in wait and stands still under water at a depth of d = 2 0 0 m to track down an enemy espionage submarine, which is at the same depth. Our submarine has two hydrophones installed at the bow and the stern of the ship at points A and B, which are l = 1 3 0 m apart from each other. The engine of the enemy submarine emits a short and high sound at regular intervals, which is detected by hydrophones. The recorded sound signals for two of these sounds are shown below.
What is the speed of the enemy submarine in m / s ?
Assume the speed of sound c = 1 5 0 0 m/s .
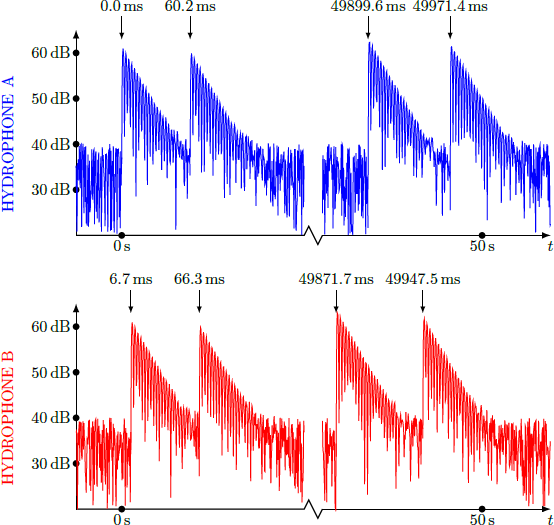
Hint: Find out why, in addition to the primary signal, there is another signal that follows the primary signal 60 to 80 milliseconds later.
The answer is 6.99.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
1 solution
We can do better than simply estimate the time difference as 5 0 seconds between signals. Since we know the distance from the submarine to both hydrophones, we can calculate at what time the sound was emitted from the enemy sub each time. The times for hydrophones A and B are consistent, and give a time difference of 5 0 seconds accurate to 3 SF.
Another possible answer is 29.91 m/s, if the enemy ship travels from one side to the other side; that is, y 1 and y 2 have opposite signs.
Log in to reply
Yes, but... This would imply the moving sub travelled more or less right over the top of the stationery listening sub. And also its speed would be circa 40 m/s and that also is unlikely.
Log in to reply
It would be 30 m/s, or 75 mph. That is indeed a bit fast for a sub.
Note also that is s A , 1 = 8 4 0 . 8 and s B , 1 = 8 5 0 . 1 , then the time difference between the direct signals should be Δ t = 1 5 0 0 8 5 0 . 1 − 8 4 0 . 8 = 6 . 2 m s . However, the measured difference is 6 . 7 m s . This could be explained from a difference in height between the ships, and would require a slight adjustment in the calculated horizontal distance.
Log in to reply
Agreed! I calculated times according to the enemy submarine's clock based on distances from the two hydrophones. (The two hydrophones give mutually consistent answers, of course.)
The secondary signal is the echo reflected from the water surface. Therefore, the signals corresponds to different path length s and s ′ = s 2 + 4 d 2 and arrive at different times t and t ′ at the hydrophone with ⇒ ⇒ ⇒ ⇒ t t ′ c ( t ′ − t ) ( c ( t ′ − t ) + s ) 2 c 2 ( t ′ − t ) 2 + 2 s c ( t ′ − t ) s = c s + t 0 = c s 2 + 4 d 2 + t 0 = s 2 + 4 d 2 − s = s 2 + 4 d 2 = 4 d 2 = 2 δ 4 d 2 − δ 2 with the path difference δ = c ( t ′ − t ) . Therefore, we can estimate the distances s A , 1 s B , 1 s A , 2 s B , 2 ≈ 8 4 0 . 8 m ≈ 8 5 0 . 1 m ≈ 6 8 9 . 0 m ≈ 6 4 6 . 8 m between the hydrophones A and B and the sound source. With the help of triangulation we can estimate the ( x , y ) coordinates of the enemy submarine: ⇒ ⇒ ⇒ s A 2 s B 2 s A 2 − s B 2 x y = x 2 + y 2 = ( x − l ) 2 + y 2 = 2 x l − l 2 = 2 l s A 2 − s B 2 + l 2 = s A 2 − x 2 Numerical evalution results the coordinates ( x 1 , y 1 ) ( x 2 , y 2 ) ≈ ( 4 , 8 4 1 ) m ≈ ( 2 8 2 , 6 2 9 ) m With a time difference of Δ t ≈ 5 0 s between both events we can estimate a velocity v = Δ t ( x 2 − x 1 ) 2 + ( y 2 − y 1 ) 2 ≈ 6 . 9 9 s m