Locate The D: Revised
The following figure shows a square A B C D in the x y -plane. Points E is located on line A D so that D is located between A and E and ∠ A B E = 6 0 ∘ . Points K , M ( 1 ; 2 ) and N ( 1 ; 1 ) are the mid-points of line segments B E , C E and K D respectively.
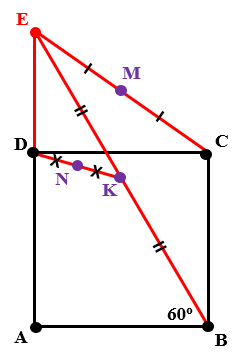
If the coordinate of point D can be represented as ( x d ; y d ) , with x d , y d ∈ R and x d < 1 , find x d + y d and round the result to the nearest hundredth.
Note: Please don't use any computer programs. Basic geometry + coordinate geometry solutions are really welcomed! This problem has been revised due to an error in its making. The above figure is not drawn to scale.
The answer is 1.37.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
There are four unknowns: The two coordinates of point A ( A x , A y ) , the square side length S , and the rotation angle for the square relative to the x axis θ . I used a hill-climbing algorithm to find the set of values ( A x , A y , S , θ ) which makes point M equal to ( 1 , 2 ) and point N equal to ( 1 , 1 ) .
The answers come out to be:
A = ( 2 3 , − 2 3 ) S = 2 θ = 3 0 ∘ D = ( 2 1 , 2 3 )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 |
|
@Steven Chase
The author has said above please dont use any programing.
After even that you are posting programmed solutions. You are such a stud guy. And that's the reason I like you.
By the way, are you happy with election results? And which party you were supporting?
Waiting for your reply.
I solved this problem using coordinate geometry. First attach a frame O ′ x ′ y ′ to the figure with the origin O ′ at point A. The x ′ axis extends to the right along AB, and the y ′ axis extends along AD upward. Taking the side length of square A B C D to be s , we can express the coordinates of all the points of interest with respect to this frame, as follows, A ′ = ( 0 , 0 ) , B ′ = ( s , 0 ) , C ′ = ( s , s ) , D ′ = ( 0 , s ) . Now from the angle condition we know that A E = tan 6 0 ∘ A B = 3 s , hence, E ′ = ( 0 , 3 s ) . Next, we can determine the coordinate of points M , K and N , using the midpoint formula,
M ′ = 2 1 ( C ′ + E ′ ) = ( 2 1 s , 2 1 ( 1 + 3 ) s )
K ′ = 2 1 ( B ′ + E ′ ) = ( 2 1 s , 2 3 s )
N ′ = 2 1 ( K ′ + D ′ ) = ( 4 1 s , 2 1 ( 1 + 2 3 ) s )
Now, coordinates p in the absolute frame O x y are related to the coordinates p ′ in the O ′ x ′ y ′ frame by
p = p 0 + R p ′
for some rotation matrix R . We know that M = ( 1 , 2 ) and that N = ( 1 , 1 ) , therefore,
M − N = ( 1 , 2 ) − ( 1 , 1 ) = ( 0 , 1 ) = R ( M ′ − N ′ ) = R ( 4 1 s , 4 3 s )
Recall that a rotation matrix is of the form R = [ cos θ sin θ − sin θ cos θ ] . Hence,
( 0 , 1 ) = ( 4 1 s ( cos θ − 3 sin θ ) , 4 1 s ( sin θ + 3 cos θ ) )
The x-coordinate of the above equation, implies that θ = 6 π , and using this into the y-coordinate, yields s = 2 .
Now, we have
M = ( 1 , 2 ) = p 0 + R M ′ = p 0 + R ( 1 , 1 + 3 )
and
D = ( x d , y d ) = p 0 + R ( 0 , 2 )
Subtracting the first from second yields,
( x d − 1 , y d − 2 ) = R ( − 1 , 1 − 3 ) = ( − 2 3 − 2 1 + 2 3 , − 2 1 + 2 3 − 2 3 ) = ( − 2 1 , − 2 + 2 3 )
Hence,
( x d , y d ) = ( 2 1 , 2 3 )
And therefore, the answer is, 2 1 + 2 3 ≈ 1 . 3 6 6
The problem may seem short but this is a pretty confusing and long problem.
We can calculate the length of line segment M N which is 1 .
Point P is the mid-point of line segment C K .
We have:
M P ∥ B E , M P = 1 / 2 E K = 1 / 4 E B , ∠ M P N = ∠ E B A = 6 0 , ∠ N M P = ∠ E B A = 6 0 ⇒ M N P is an equilateral triangle. ⇒ the side length of the square A B C D is 2.
To find the location of D, we have to calculate the length of D M and D N .
We have:
D N = D K / 2 so we need to calculate D K .
Triangle D E K with E K = 2 M P = 2 and ∠ D E K = 3 0 . E D = E A − D A , E A , D A can be determined ⇒ E D .
Apply the Cosine rule in a triangle, we can determine the length of D K . Then D N = D K / 2 (1)
D M = E C / 2 . We can determine E C , therefore D M (2)
We already have the lengths of D N , D M from (1), (2) and the coordinate of point M , N so we can use a set of equations to solve for D . We will find out that x d = 1 / 2 a n d 3 / 2 and y d = 3 / 2 in both cases. Given that we only take the value 1 / 2 of x d from the requirement.
In conclusion, x d + y d = 1 / 2 + 3 / 2 = 1 . 3 7 .