Non Rigid Pendulum - Realistic Case
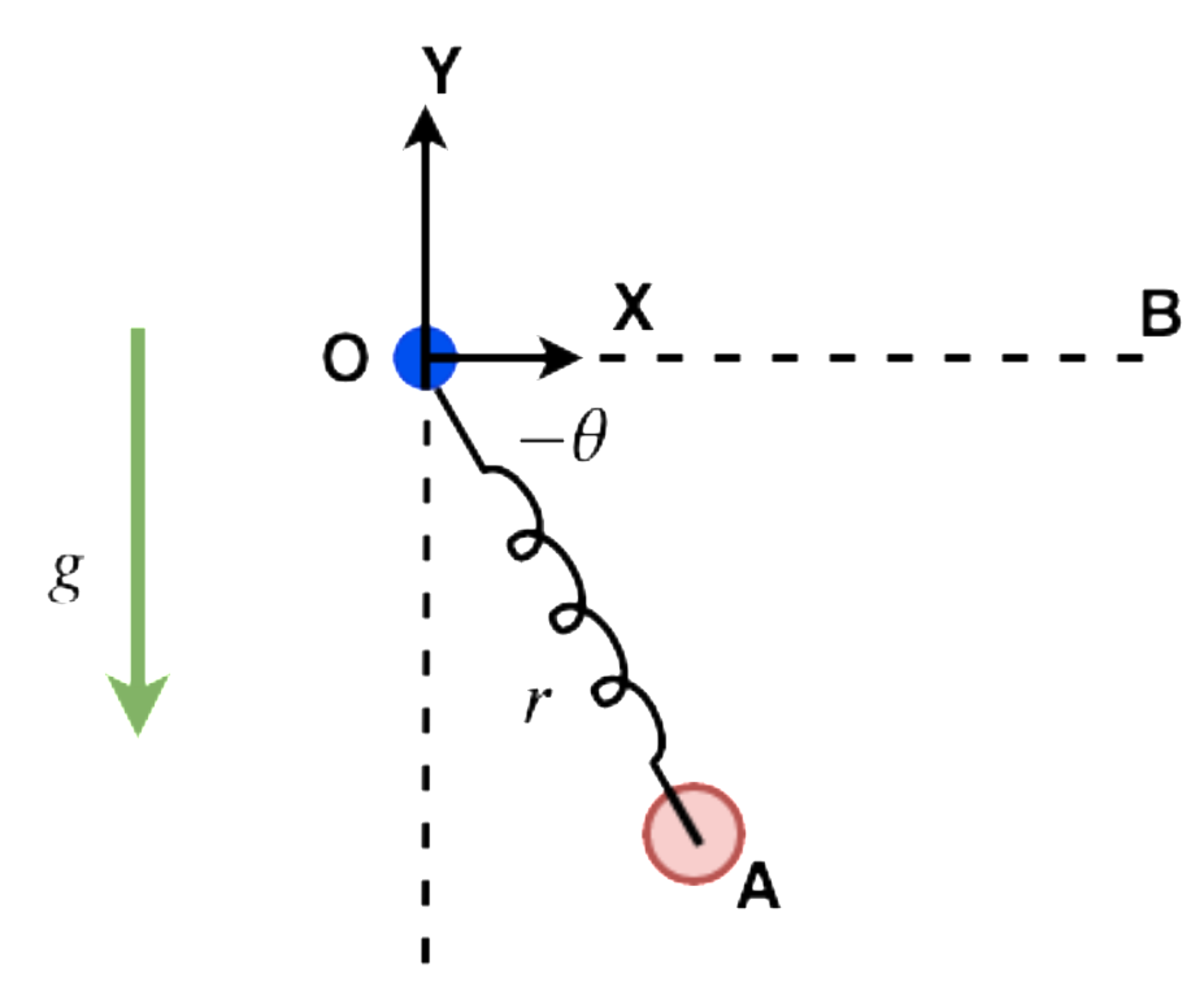
Consider a point mass (marked as red) attached to a spring of instantaneous length . The spring makes an angle to the horizontal.
The mass experiences a drag force and damping forces which are quantified by the following equations:
The direction of the damping force is the same as that of the spring force. The system is released from rest from the coordinates at time . Enter your answer as the magnitude of the total energy of the system after a time of . The X-axis is considered to be the level of zero gravitational potential energy.
Note:
-
-
The point is fixed at the origin of the coordinate system and is marked in blue.
-
The natural length of the spring is 0.3 m.
-
Spring constant =
-
Mass =
-
Naming the angle instead of is deliberate as an anticlockwise rotation is considered to be positive.
-
-
is the instantaneous velocity vector of the mass.
-
is the rate of change of spring length at any instant of time.
Bonus: Plot the trajectory and any other relevant quantities and explain the results. For those who attempted the previous version of this problem, how different are the results? To make this dynamic system more realistic, what other factors can be considered apart from air drag and damping?
Hint: Use numerical integration to solve the equations of motion.
The answer is 5.4826.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
This was a fun one. I did everything in x y and numerically differentiated to get r ˙ . Simulation code is attached. Also attached are some plots of the x y trajectory, and the speed over time. At t = 1 0 , the mass is nearly at rest, but it picks up speed again. Over time, the kinetic energy is sapped away by the damping forces.