Non Rigid Pendulum - Realistic Case - 2
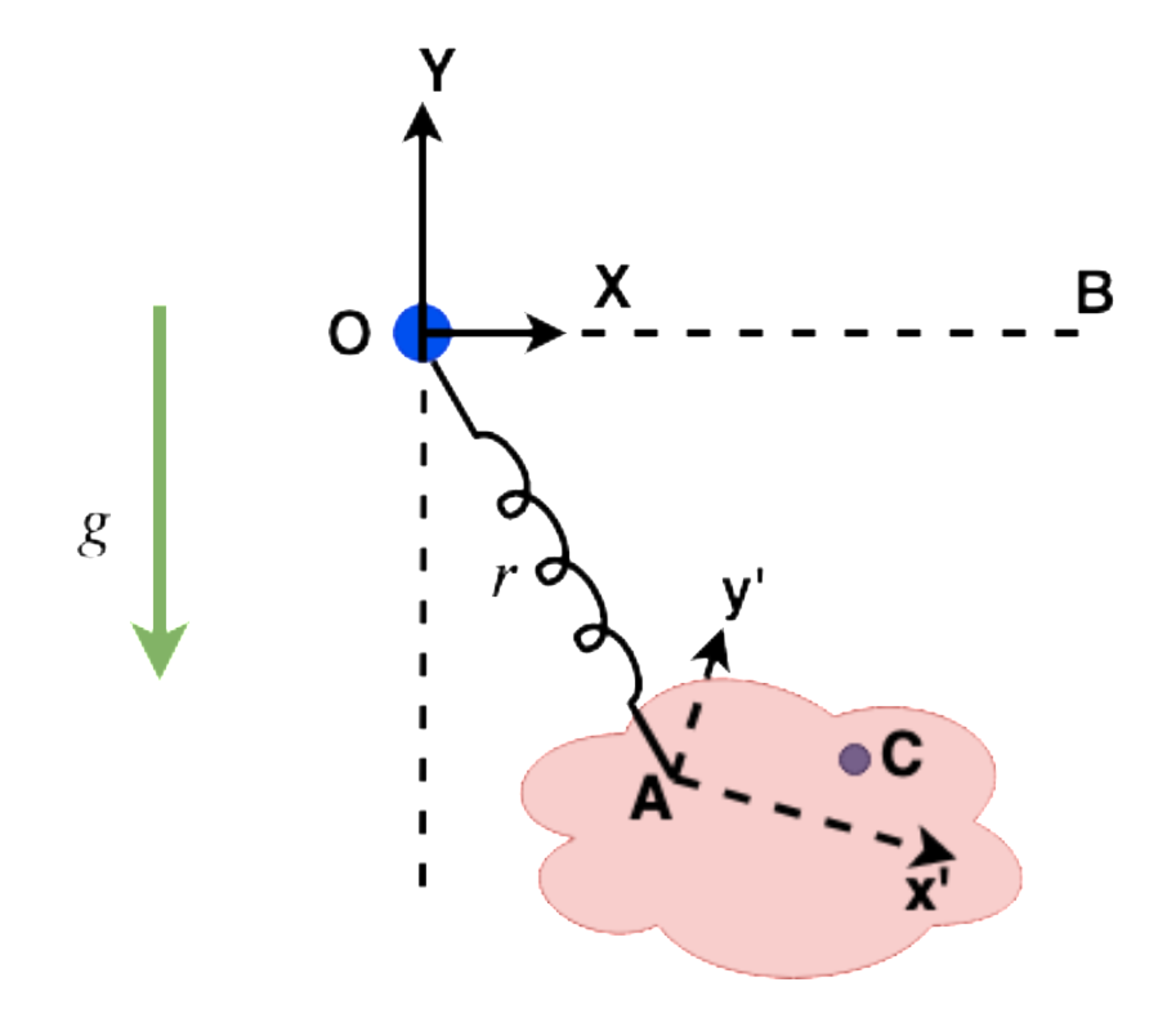
Consider an arbitrarily shaped rigid body (marked as red) attached to a spring of instantaneous length . The center of mass of the body is located at point C. In this problem, two coordinate frames of reference are defined. One is a global (or inertial) coordinate frame, the origin of which is point O. The other is a body-fixed frame, the origin of which is at point A. The coordinates of the center of mass of the rigid body relative to the body-fixed frame are . The moment of inertia of the rigid body about its Z-axis is .
The mass experiences drag force and damping forces which are quantified by the following equations:
The direction of the damping force is the same as that of the spring force. The system is released from rest when the coordinates of point A are at time . At the initial instant, the X and Y axes of the body fixed and inertial frames are parallel and are pointing in the same direction. Enter your answer as the magnitude of the total energy of the system after a time of . The X-axis is considered to be the level of zero gravitational potential energy.
Note:
-
-
The point is fixed at the origin of the coordinate system and is marked in blue.
-
The natural length of the spring is 0.3 m.
-
Spring constant =
-
Mass =
-
-
is the instantaneous velocity vector of the center of mass of the rigid body.
-
is the rate of change of spring length at any instant of time.
Bonus: Analyse the results by plotting any relevant quantities and compare the results to the case when the body is treated as a point mass.
The answer is 5.0856.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
Another interesting problem. This one is a mixture of Cartesian and polar calculations. I calculated all of the rotational aspects with respect to the center of mass. Simulation code is below. The plots actually look quite similar to the ones from the previous problem, so I won't post them.