Oort Cloud Parabolic Comet
A comet in the Oort cloud falls towards the Sun. As it picks up speed from the Sun's gravity, it accidentally picks up a very tiny extra velocity boost from a nearby object in the solar system, so that its trajectory is now a true parabola. It eventually whips around the Sun and begins to travel back out into the far reaches of space.
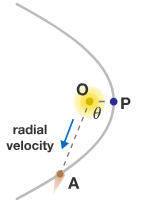
Let θ be the angle ∠ P O A , where point O is the center of the Sun, point P is where the comet has come closest to the Sun, and point A is where it is on the trajectory outward.
The radial velocity of the comet relative to the Sun is the speed in which the comet is moving away from the Sun in the direction of the line O A . For what angle θ is this radial velocity the greatest?
Express your answer to the nearest degree.
Note:
Kepler orbits are commonly described by the polar equation
r
(
θ
)
=
1
+
e
cos
(
θ
)
a
(
1
−
e
2
)
,
where
a
is the semi-major axis, and
e
is the eccentricity. For a circle,
e
=
0
;
for an ellipse,
0
<
e
<
1
;
for a parabola,
e
=
1
;
for a hyperbola,
e
>
1
. Also, you may want to look up
Kepler's laws
and
vis-viva equation
.
The answer is 90.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
Hi Michael,
I wonder what you think of this short solution?
In the given coordinate system we can describe the parabola by
r = 1 + c o s θ k or
r 1 = k 1 ( 1 + c o s θ )
Differentiate wrt time to get
− r 2 r ˙ = − k θ ˙ s i n θ
and so
r ˙ = k r 2 θ ˙ s i n θ
Now all the physics we need is the observation that r 2 θ ˙ is a constant (why not call it L?). According to taste this is justified by the conservation of angular momentum, or by appealing to Kepler's second law.
So now
r ˙ = k L sin θ
since L and k are constants this is maximised when θ = 9 0 degrees.
Log in to reply
See my solution. The relationship between r ˙ and d θ d u is what you are showing here...
It does seem like everybody so far has been able to provide solutions shorter than mine. Brilliant will soon be making available a course on Gravitation, and it will include orbital dynamics. Using the polar form (with the origin at one of the foci) to describe Keplerian trajectories is a common practice, but I did notice the difficulty with the special case of parabolic trajectories. The question becomes, "is there a more natural way to describe such Keplerian trajectories without running into this particular difficulty?"
The fact that r ¨ = − r 3 G M r , where M is the mass of the sun, means that r ∧ r ¨ = 0 , so that h = r ∧ r ˙ is a constant vector such that r ⋅ h = 0 . Thus the motion of the comet is planar, and h is conserved. If we define unit vectors r ^ = cos θ i + sin θ j t ^ = − sin θ i + cos θ j where i , j , k are mutually perpendicular unit vectors, with i , j in the plane of the comet's motion, with i pointing in the direction O P , then r r ˙ r ¨ = r r ^ = r ˙ r ^ + r θ ˙ t ^ = ( r ¨ − r θ ˙ 2 ) r ^ + ( 2 r ˙ θ ˙ + r θ ¨ ) t ^ and so the equation of motion of the comet is r ¨ − r θ ˙ 2 = − G M r − 2 d t d ( r 2 θ ˙ ) = 0 Thus r 2 θ ˙ = h is constant (note that h = h k is the conserved vector, and m h is the angular momentum of the comet) and r ¨ − h 2 r − 3 = − G M r − 2 Putting r = u − 1 we have r ˙ r ¨ = − u − 2 × d θ d u × θ ˙ = − h d θ d u = − h d θ 2 d 2 u × θ ˙ = − h 2 u 2 d θ 2 d 2 u and hence d θ 2 d 2 u + u = h 2 G M leading to the general solution u = h 2 G M + A cos θ + B sin θ . This has shown the conic nature of the paths.
For this problem we have u = a − 1 ( 1 + cos θ ) and we want to maximize r ˙ = − h d θ d u = a h sin θ . The value of r ˙ is therefore maximised when sin θ = 1 , so when θ = 9 0 ∘ .
I should steal your ideas here and put them in a wiki on *Orbits--Problem Solving". This is working from the basic premises, without referring to equations previously established. Upvoted!
Log in to reply
Feel free. What I have done is the standard solution of the equations of planetary motion. Since the equation r ˙ = − h d θ d u makes the problem you defined easy to solve, I felt it worth setting out the full derivation, so that I could use that equation to solve the problem.
What is fun is showing that Kepler's three laws force an r − 2 central force of attraction. In other words, Kepler's laws can only be true if Newton's law of gravitation is valid.
Cartesian to Polar Transformation
First, we know that a parabola has the property that any vertically incoming ray gets reflected towards its focal point. One can find such a point by noticing that at the point on the parabola where the tangent line is at 4 5 ∘ , a vertically incoming ray will get reflected by 9 0 ∘ . This means that the y -coordinate of such a point is the y -coordinate of the focal point.
If we use y = e x 2 − a as our general expression of our parabola, and the fact that a line at 4 5 ∘ has a slope of 1 , then
y ′ = 2 e x = 1 ⇒ x = 2 e 1
Substituting back into our original equation, we get
y = e ( 2 e 1 ) 2 − a
⇒ a = 4 e 1
⇒ y = 4 a 1 x 2 − a
By using the transformation x = − r sin θ , y = r cos θ , and doing some algebra to solve for r , we get
r ( θ ) = 1 + cos θ 2 a
The Equations of Motion
First, we know that the radial velocity is equal to the rate of change of the radius with respect to time. Thus,
v r = d t d r = d θ d r d t d θ
= 2 a ( 1 + cos θ ) 2 sin θ d t d θ
Similarly, the rate of change of the radial velocity is the radial acceleration. In addition, since our origin is at the focus of the parabolic trajectory, and the sun is at the focus, then the radial acceleration is the only acceleration experienced by the comet; this acceleration is the acceleration due to gravity.
Since all we care about is the angle at which the maximum radial velocity happens, for simplicity I will regard the product G M from Newton's equation for gravity as equal to 1 . Thus, the acceleration due to gravity is g = r 2 1 . Therefore,
d t d v r = d θ d v r d t d θ
= r 2 1 = 4 a 2 ( 1 + cos θ ) 2
We can now combine the equation of velocity and the equation of acceleration, getting rid of the term d t d θ , to get the differential equation
d θ d v r = 2 v r a sin θ
Through separation of variables, we get
∫ v r ( 0 ) v r ( θ ) v d v = 2 a 1 ∫ 0 θ sin θ ′ d θ ′
Note that the prime on the θ does not mean derivative. It is just there to express the fact that the θ we are integrating over is different from the one in the bounds of the integral!
Now, notice that when the comet is at the bottom of the parabola, its direction of motion is perpendicular to its acceleration. This means that the only velocity the comet has at that point is tangential velocity. Thus, v r ( 0 ) = 0 .
Integrating and solving for v r we get
v r ( θ ) = a 1 ( 1 − cos θ )
Finding the Maximum Radial Velocity
One can see that the term 1 − cos θ reaches a maximum when cos θ = 0 ⇒ θ = 9 0 ∘ .
Since the maximum of our v r ( θ ) function will happen when 1 − cos θ is at its maximum, then v r , m a x happens when θ = 9 0 ∘ .
First we start with the vis-visa equation
v 2 = G M ( r 2 − a 1 )
where v is the tangential velocity of the body on the Keplerian trajectory.
For a parabola where a → ∞ , this becomes
v 2 = G M ( r 2 )
At the perihelion, where the maximum tangential velocity is v 0
v 0 2 = G M ( a ( 1 − e ) 2 )
or
a ( 1 − e ) = v 0 2 2 G M
Then we use the polar equation for Keplerian trajectories
r = 1 + e C o s ( θ ) a ( 1 − e 2 )
or
r = a ( 1 − e ) 1 + e C o s ( θ ) 1 + e
After substitution, we have
r = v 0 2 2 G M 1 + e C o s ( θ ) 1 + e
Since
v 2 = G M ( r 2 )
we have
v 2 = v 0 2 1 + e 1 + e C o s ( θ )
Finally we use the angular momentum expression for bodies in Keplerian trajectories, which is a constant
L 2 = r 2 v t 2 m 2 = G M m 2 a ( 1 − e 2 )
where v t is the transverse velocity of the body on the Keplerian trajectory, and m is the mass of the body. With substitution and letting e = 1 , this becomes
( v 0 2 2 G M 1 + e C o s ( θ ) 1 + e ) 2 v t 2 = ( v 0 2 G M ) 2
or
v t 2 = v 0 2 ( 1 + e 1 + e C o s ( θ ) ) 2
The radial velocity is thus
v r = v 2 − v t 2 = v 0 ( 1 + e 1 + e C o s ( θ ) ) − ( 1 + e 1 + e C o s ( θ ) ) 2
which, letting e = 1 , simplifies to
v r = v 0 2 S i n ( θ )
so that the answer is
2 π = 9 0 °
for maximum v r
The difficulty is handling the special case where e = 1 and a → ∞ , but such that a ( 1 − e ) is a finite real.
In the general case, the radial velocity for any Keplerian trajectory is
v r = a ( 1 − e 2 ) G M e S i n ( θ )
which, after substituting a ( 1 − e ) = v 0 2 2 G M and letting e = 1 will yield the same result as above. However, note that the maximum radial velocity occurs at 2 π = 9 0 ° for any e .