Pivoting planks.
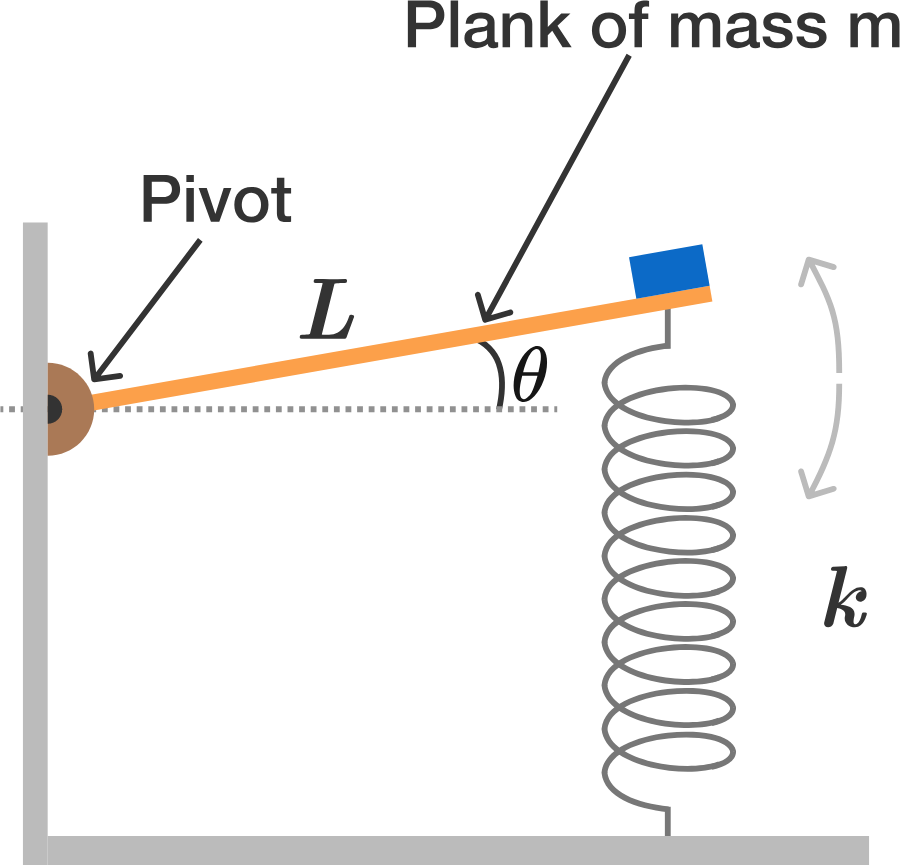
A horizontal plank of mass m and length L is pivoted at one end and is attached by a spring of force constant k at the other end.
A small mass M is glued at the free end of the plank supported by the spring.
When the plank is displaced upward by a small angle of θ from its equilibrium position and released, it undergoes simple harmonic oscillations at angular frequency expressed as ω = m + b M a k . What is a + b ?
The answer is 6.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
Nice solution sir.
Relevant wiki: Simple Harmonic Motion - Problem Solving
Consider small angles sin θ ≃ θ , cos θ ≃ 1 .
Force of the spring is k θ L . Force times distance L from the pivot gives torque equal to θ k L 2 .
Gravitational forces are g m and g M which gives torques equal to g m 2 L and g M L .
From Newton's 2nd law:
θ ¨ I = − θ k L 2 − g L ( 2 m + M ) .
One can divide by planks moment of inertia I = M L 2 + 3 1 m L 2 which gives:
θ ¨ = − θ I k L 2 − I g L ( 2 m + M ) .
From harmonic oscillator equation:
ω 2 = I k L 2 = M L 2 + 3 1 m L 2 k L 2 = 3 M + m 3 k .
It is worth noting that we cannot simultaneously have the equilibrium position of the plank being horizontal and the natural length of the spring being the height of the pivoted plank. The spring must be under compression at the horizontal for the plank to be in equilibrium there - the thrust in the spring has to oppose the weights of the plank and the mass.
It is well assumed that the plank and the mass is balanced by an external force to maintain equilibrium within the system. So the spring doesn't get compressed initially. This is the dubious terminology. Evem I got confused when I first encountered this kind of problem.
Log in to reply
But there is no need to assume the existence of this phantom force. The problem has the desired solution if we assume that the system is in equilibrium with the plank horizontal. Since the problem is expressed in terms of the spring constant k and not the modulus of elasticity, there is no need to know the natural length of the spring, provided that Hooke's Law holds throughout the motion. I was not confused by this problem; I would like its statement improved.
Log in to reply
I agree with you that we don't need to know about the natural length of the spring. All we need to know the spring constant and the equilibrium position. Moreover, the time period of such motions are independent of gravity we can completely ignore the gravity and then the horizontal position will be both the natural and equilibrium position for the system.
Relevant wiki: simple harmonic oscillator
Plank kinetic energy:
E p l a n k = 2 1 ( 3 m L 2 ) θ ˙ 2
Mass kinetic energy:
E m a s s = 2 1 M L 2 θ ˙ 2
Plank gravitational potential energy relative to rest position:
U p l a n k = 2 1 m g L sin θ
Mass gravitational potential energy relative to rest position:
U m a s s = M g L sin θ
Spring potential energy relative to rest position:
U s p r i n g = 2 1 k L 2 sin 2 θ
Forming the Lagrangian and using the small angle approximation ( sin θ ≈ θ ) :
L = E t o t a l − U t o t a l = 2 1 ( 3 m L 2 ) θ ˙ 2 + 2 1 M L 2 θ ˙ 2 − 2 1 m g L θ − M g L θ − 2 1 k L 2 θ 2
Equation of motion for θ :
d t d ∂ θ ˙ ∂ L = ∂ θ ∂ L
Evaluating gives:
θ ¨ ( 3 m L 2 + M L 2 ) = − 2 1 m g L − M g L − k L 2 θ
Homogeneous equation:
θ ¨ ( 3 m L 2 + M L 2 ) = − k L 2 θ θ ¨ ( m + 3 M ) = − 3 k θ
This corresponds to harmonic motion with the following angular frequency:
ω = θ ˙ = m + 3 M 3 k