Playground physics
Alice and Bob are having fun throwing a ball to each other on a merry-go-round. Charlie looks at the game from outside of the merry-go-round. From his perspective, the ball thrown by Alice flies straight along the y -axis at a constant velocity of v = v 0 e y to Bob. Bob can catch this ball after the flight time t 0 = T / 4 , because the merry-go-round has completed a quarter turn in the meantime.
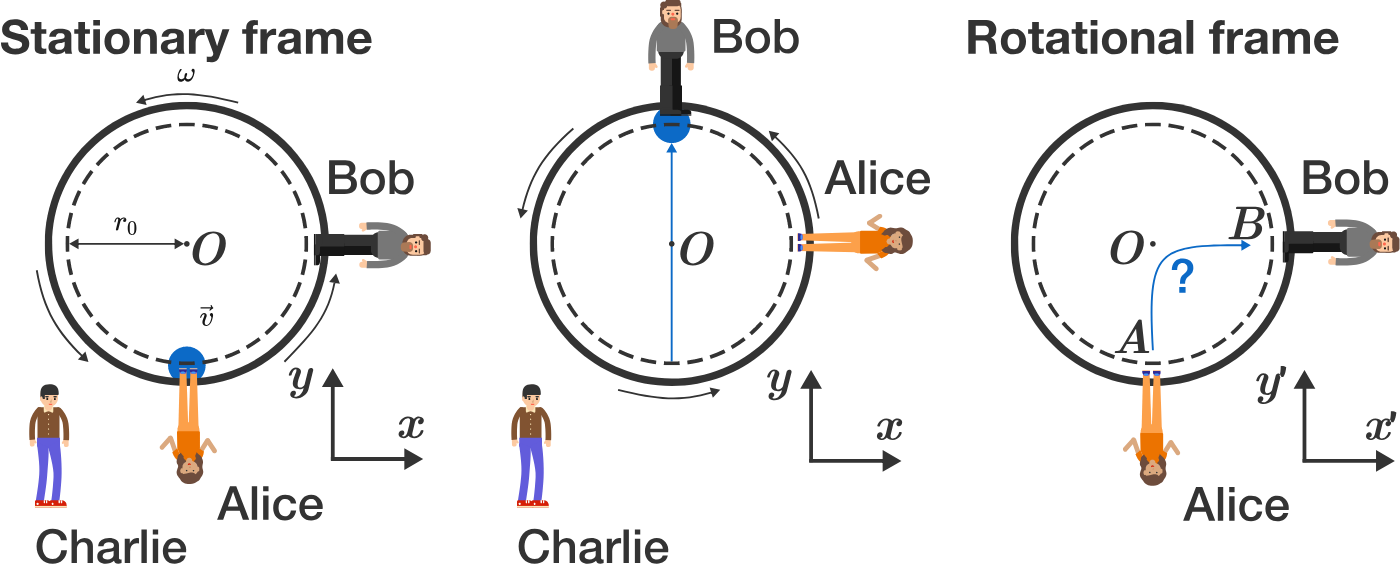
But how does Alice observe (rotating reference system)? What average speed (average of absolute value of velocity vector) v ′ = t 0 1 ∫ 0 t 0 ∣ v ′ ∣ d t does the ball have from Alice's perspective?
Give the answer in units of v 0 and with an accuracy of 3 decimal places.
Hints:
- The merry-go-round rotates with constant frequency ω = 2 π / T , so that Alice ( point r A ) and Bob ( point r B ) move on circular paths in the stationary reference system. In the rotating reference system, both points r A ′ and r B ′ are stationary.
- Search for a 2 × 2 matrix D such that the transformation reads r ′ = D ⋅ r . For the calculation of the average velocity, you may use the integral: ∫ 1 + x 2 d x = 2 1 ( x 1 + x 2 + arcsinh ( x ) ) .
Bonus question: Which (fictitious) forces act on the ball in the rotating reference system? How can we explain the path of the ball?
The answer is 1.095.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
1 solution
What is wrong in the following approach?
The ball travels a distance 2R in ground frame in time T/4 with speed 2 v 0 \begin{array}{I} 2R = {v_0}\frac{T}{4}\\ \text{If we use the following definition of average velocity in the rotating frame, then}\\ {V_{avg}} = \frac{{displacement}}{{time}}\\ = \frac{{\sqrt 2 R}}{{T/4}} = \frac{{4\sqrt 2 R}}{T} = \frac{{4\sqrt 2 }}{8}{v_0} = 0.707{v_0} \end{array}
Log in to reply
This is actually a different way to calculate an average veloctiy. Your velocity is v avg = ∣ ∣ ∣ ∣ t 0 1 ∫ 0 t 0 v d t ∣ ∣ ∣ ∣ = ∣ ∣ ∣ ∣ t 0 r ( t 0 ) − r ( 0 ) ∣ ∣ ∣ ∣ = t 0 d with the distance d between start and end point. On the other hand my average velocity results to v = t 0 1 ∫ 0 t 0 ∣ v ∣ d t = t 0 l with the path length l of the whole trajectory. Since the path of the ball is not a straight line, it follows l > d or v > v avg We get a good approximation for the path length, if we assume the path as a semicircle through the points A, B and O with radius R ′ = R / 2 . Therefore l ≈ π R ′ ⇒ v = t 0 l ≈ 2 2 π v 0 ≈ 1 . 1 1 v 0
Log in to reply
Ahhh, I just realized that you have the modulus of velocity in the definition. I would suggest changing average velocity to the average speed in the problem statement. This should resolve the confusion.
This is exactly what I did, the engineering approach :)
Nice problem.
With the transformation matrix D = ( cos ω t − sin ω t sin ω t cos ω t ) we can derive the path of the ball in the rotational frame ⇒ ⇒ ⇒ r ′ v ′ ∣ v ′ ∣ v ′ = D ⋅ ( − r 0 + v 0 t ) e y = ( − r 0 + v 0 t ) ( sin ω t cos ω t ) = d t d r ′ = v 0 ( sin ω t cos ω t ) + ( − r 0 + v 0 t ) ω ( cos ω t − sin ω t ) = v 0 2 + ω 2 ( v 0 t − r 0 ) 2 = v 0 1 + ω 2 ( t − t 0 / 2 ) 2 = t 0 v 0 ∫ 0 t 0 1 + ω 2 ( t − t 0 / 2 ) 2 d t = π 2 v 0 ∫ − π / 4 π / 4 1 + τ 2 d τ = π v 0 [ τ 1 + τ 2 + arcsinh ( τ ) ] − π / 4 π / 4 = π 2 [ 4 π 1 + 1 6 π 2 + arcsinh ( 4 π ) ] v 0 ≈ 1 . 0 9 5 ⋅ v 0
The average velocity is thus almost 10% higher than in the stationary reference system. The velocity value varies between the maximum value v ′ ≈ 1 . 2 7 v 0 on the edge and the minimum value v ′ = v 0 in the center of the disk. The path is determined by the centrifugal force F cf and the Coriolis force F C given by F cf F C = m ω × ( r ′ × ω ) = 2 m ( v ′ × ω ) with the vector ω = ω e z of the angular velocity. The centrifugal force is directed radially outwards and brakes the ball on its way from A to O and accelerates it again from O to B . What is more decisive, however, is the effect of the Coriolis force, which only changes the velocity direction and deflects the ball to the right, so that the path curve corresponds virtually to a semicircle. Because of the ratio ∣ F C / F cf ∣ > 3 of the two forces, here the centrifugal force has only a minor role.