Ring with beads
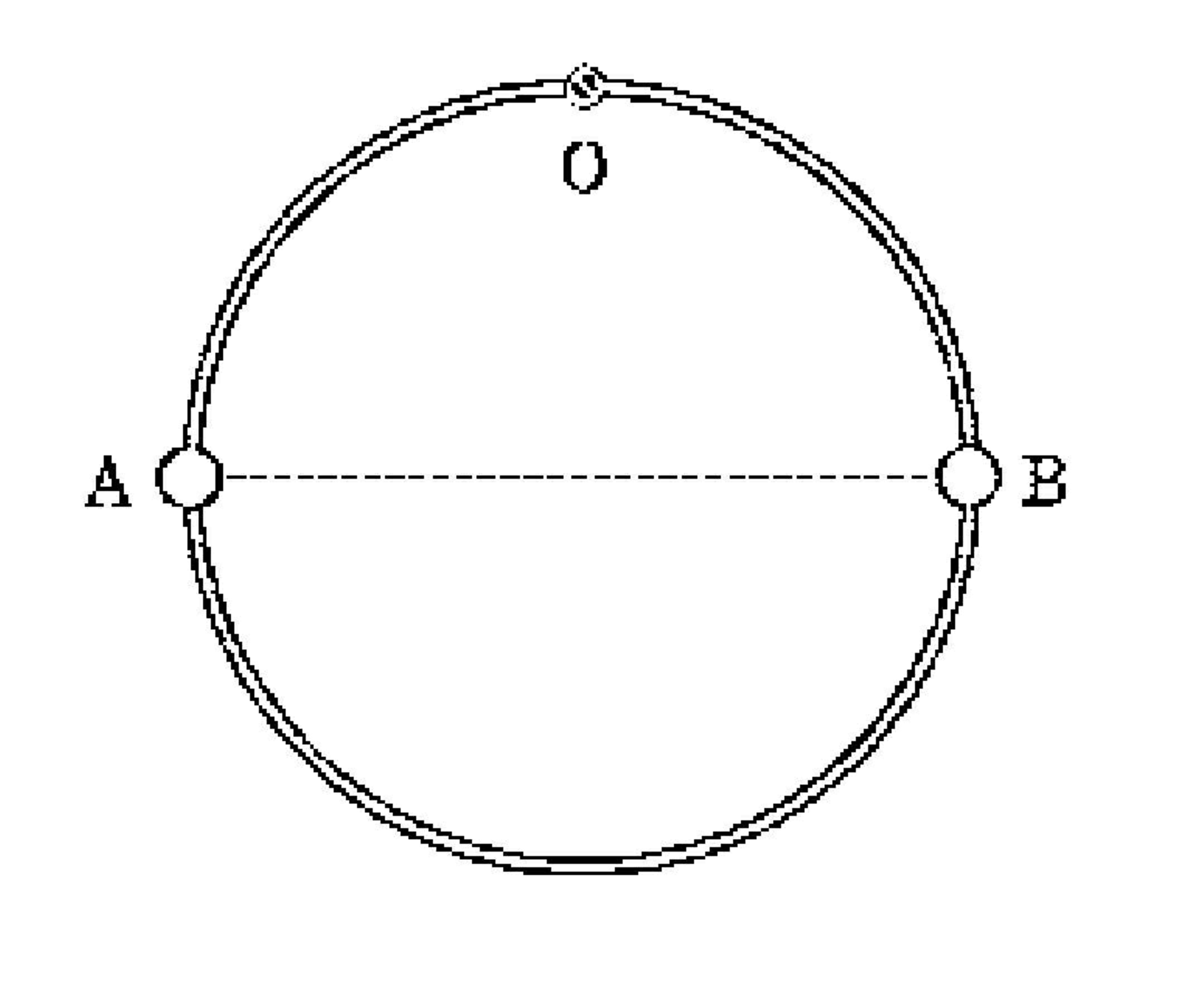
A light ring of radius
wearing two identical beads
and
each of mass
is hinged at its top point
in such a way that it can rotate freely in its plane about a horizontal axis through the hinge
. The bead
is affixed on the ring and the bead
is held so that they occupy position of the ends of the horizontal diameter of the ring and the system stays system stays motionless. The ring is well lubricated so that the bead
can slide with negligible friction on the ring.
Determine acceleration of the beads immediately after the bead is released and final angle of rotation of the ring when all motion ceases after a long time due to the little viscous friction between the bead and the ring.
Acceleration due to the gravity is .
Answer will come in the form of
Acceleration of bead A :
Acceleration of bead B :
Final angle of rotation :
Type your answer as
Thanks in advance, if you are going to post a solution.
The answer is 2.025.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
I have used the Lagrangian formulation to solve this. Any other fundamental approach would be too tedious, in my opinion.
Say at a general time t the ring has rotated anticlockwise about O by θ . At the same time, B has rotated along the ring clockwise by an angle ϕ . Based on this, the coordinates of points A and B are:
x A = R sin θ − R cos θ y A = − R cos θ − R sin θ
x B = R sin θ + R cos ( ϕ − θ ) y B = − R cos θ − R sin ( ϕ − θ )
I request the reader to try visualising the geometry and deriving the above coordinates by him/her self.
Having done the above, the kinetic energy of the system can be derived as such:
T = 2 m ( x ˙ A 2 + y ˙ A 2 ) + 2 m ( x ˙ B 2 + y ˙ B 2 )
The potential energy of the system is:
V = m g y A + m g y B
After simplification, the expression turn out to be:
T = 2 m ( 4 R 2 θ ˙ 2 + R 2 ϕ ˙ 2 − 2 R 2 ϕ ˙ θ ˙ + 2 R 2 θ ˙ 2 sin ϕ − 2 R 2 ϕ ˙ θ ˙ sin ϕ )
V = − m g ( 2 R cos θ + R sin θ + R sin ( ϕ − θ ) )
Lagrange's equations read:
d t d ( ∂ θ ˙ ∂ T ) − ∂ θ ∂ T + ∂ θ ∂ V = 0
d t d ( ∂ ϕ ˙ ∂ T ) − ∂ ϕ ∂ T + ∂ ϕ ∂ V = 0
Doing this entire derivative crunching gives the required equations of motion which are:
4 m R 2 θ ¨ − m R 2 ϕ ¨ + 2 m R 2 θ ¨ sin ϕ + 2 m R 2 θ ˙ ϕ ˙ cos ϕ − m R 2 ϕ ¨ sin ϕ − m R 2 ϕ ˙ 2 cos ϕ + 2 m g R sin θ − m g R cos θ + m g R cos ( ϕ − θ ) = 0
m R 2 ϕ ¨ − m R 2 θ ¨ − m R 2 θ ¨ sin ϕ − m R 2 θ ˙ 2 cos ϕ − m g R cos ( ϕ − θ ) = 0
Note that the system is at rest at the beginning so the initial conditions are:
θ ( 0 ) = ϕ ( 0 ) = θ ˙ ( 0 ) = ϕ ˙ ( 0 ) = 0
At t = 0 applying the initial conditions in the above equations and simplifying, gives the following two equations:
ϕ ¨ = 4 θ ¨ ϕ ¨ − θ ¨ = R g
Solving gives:
ϕ ¨ = 3 R 4 g θ ¨ = 3 R g
Finally, the acceleration of A and B at t = 0 is computed as follows:
a A = x ¨ A ( 0 ) 2 + y ¨ A ( 0 ) 2 a B = x ¨ B ( 0 ) 2 + y ¨ B ( 0 ) 2
Crunching out all derivatives and substituting all initial conditions are derived earlier gives:
a A = 3 g 2 a B = 3 g 1 0
Now, when the system finally comes to rest due to viscous friction, the system will be in its state of stable equilibrium. At this stage:
ϕ ˙ = θ ˙ = ϕ ¨ = θ ¨ = 0
Substituting in Lagrange's equations gives:
2 sin θ − cos θ + cos ( ϕ − θ ) = 0 cos ( ϕ − θ ) = 0 ⟹ tan θ = 2 1 Finally:
α = 3 2 β = 3 1 0 γ = 2 1