Shopping cart disaster
Grab the front of an empty shopping cart, push it backwards and let it go free. If you do that on a smooth surface and the wheels of the cart are really good and new, you will see the cart spinning violently around a vertical axis. Why does that happen? (Do not do this in a busy supermarket, you may hurt someone or damage something.)
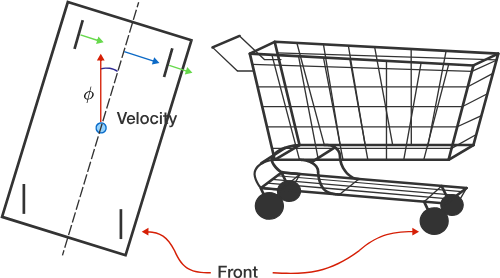
To understand the dynamics of this motion, assume that the shopping cart is originally lined up nearly parallel to the push, but there is a small angle (indicated as on the Figure) between the direction of the initial velocity and the long axis of the cart. In reality, the angle is initially much smaller than the angle on the figure, say . Note that the wheels closer to you (originally the front wheels) are "caster wheels" that are readily adjusting their direction of roll. For such wheels, under ideal circumstances, we may assume that the net horizontal force is zero (as if this side of the cart would be sliding on ice).
For the wheels farther away from you, under the handle of the cart, the horizontal forces will be perpendicular to the wheels. This is true as long as the wheels roll smoothly and there is no friction at the axles. We also assume that the magnitude of these forces are less than the force of sliding friction, so that these wheels do not slide, but roll. Replace the two forces on the two wheels (green arrows on the Figure) with a single force in the center (blue arrow).
Newton's laws can be solved without numerical integration as long as we assume that the angle is small. The solution will have the form of where the parameter and the function represent the initial conditions. Note that the exponential has a "+" sign in the time dependence, indicating that the angle will increase rapidly. Here we are interested in the parameter : this is the time constant that tells us how quickly the cart will spin out of the alignment with the velocity.
The initial velocity is The cart has a mass of and length of The center of mass of the cart is assumed to be in the middle and the moment of inertia of the cart around the center of mass is . We disregard the width of the cart for the estimation of the moment of inertia.
Of the list provided on the right, what is the best value of the time constant, in units of seconds?
Bonus: Can you show that the motion of the cart is stable (it will not spin out) if it is pushed in the forward direction?
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
For small angle ϕ we can take sin ϕ ≈ ϕ and cos ϕ ≈ 1 . The x component of the force is F and the y component is − F ϕ (points opposite to the positive y direction). The equation of motion of the center of mass is
m x ¨ = F
m y ¨ = − F ϕ
For the rotational motion around the center of mass the equation is
1 2 1 m l 2 ϕ ¨ = F ( l / 2 ) + F ( l / 2 ) ϕ 2 = 2 l F ( 1 + ϕ 2 )
We will drop the ϕ 2 term, as ϕ 2 < < 1 . We eliminate the force to get
x ¨ = 6 l ϕ ¨
y ¨ = − 6 l ϕ ¨ ϕ
To complete the solution, we need to implement the fact that the front wheels are rolling. "Rolling" means that the velocity of theses wheels is pointing in the direction of the cart and the velocity perpendicular to the cart is zero. That means the ratio of the components of the velocity is
x ˙ w / y ˙ w = tan ϕ ≈ ϕ
First we write the position of the wheels as
x w = x + 2 l sin ϕ ≈ x + 2 l ϕ
y w = y + 2 l cos ϕ ≈ y + 2 l
The velocity components are
x ˙ w = x ˙ + 2 l ϕ ˙
y ˙ w = y ˙
The ratio is
y ˙ w x ˙ w = y ˙ x ˙ + 2 l ϕ ˙ = ϕ
or
x ˙ + 2 l ϕ ˙ = y ˙ ϕ
For this equation to be useful, we need to take the time derivative,
x ¨ + 2 l ϕ ¨ = y ¨ ϕ + y ˙ ϕ ˙
We will take the expressions for x ¨ and y ¨ from the equations of motion and we insert them here:
6 l ϕ ¨ + 2 l ϕ ¨ = − 6 l ϕ ¨ ϕ 2 + y ˙ ϕ ˙
We drop the ϕ 2 term and we get
4 3 l ϕ ¨ = v ϕ ˙
Where we replaced y ˙ with the initial velocity v . The solution yields the time constant of
τ = 4 3 v l = 1 . 2 s e c
Clearly, this solution will be valid only when the angle ϕ is small and the velocity of the cart have not changed much relative to the initial velocity. Nevertheless, this solution gives us a good idea how fast the cart is getting out of the simple straight motion. The answer is simple and makes sense: the faster we move the cart, the shorter time it will need to spin around.
If we reverse the velocity the time constant becomes negative. Therefore if the cart is pushed in the forward direction, the motion is nice, smooth and stable. Of course, this is the expected way of using cart.
If we look at the dimensions of the parameters ( v :m/s and l :m) we can quickly recognize that the solution must have the form of time=length/velocity and it has to be independent of the mass. If we take l / v we get 1.5 sec, which is still the best choice of the possible answers.