Slider-Crank Mechanism - Part 1
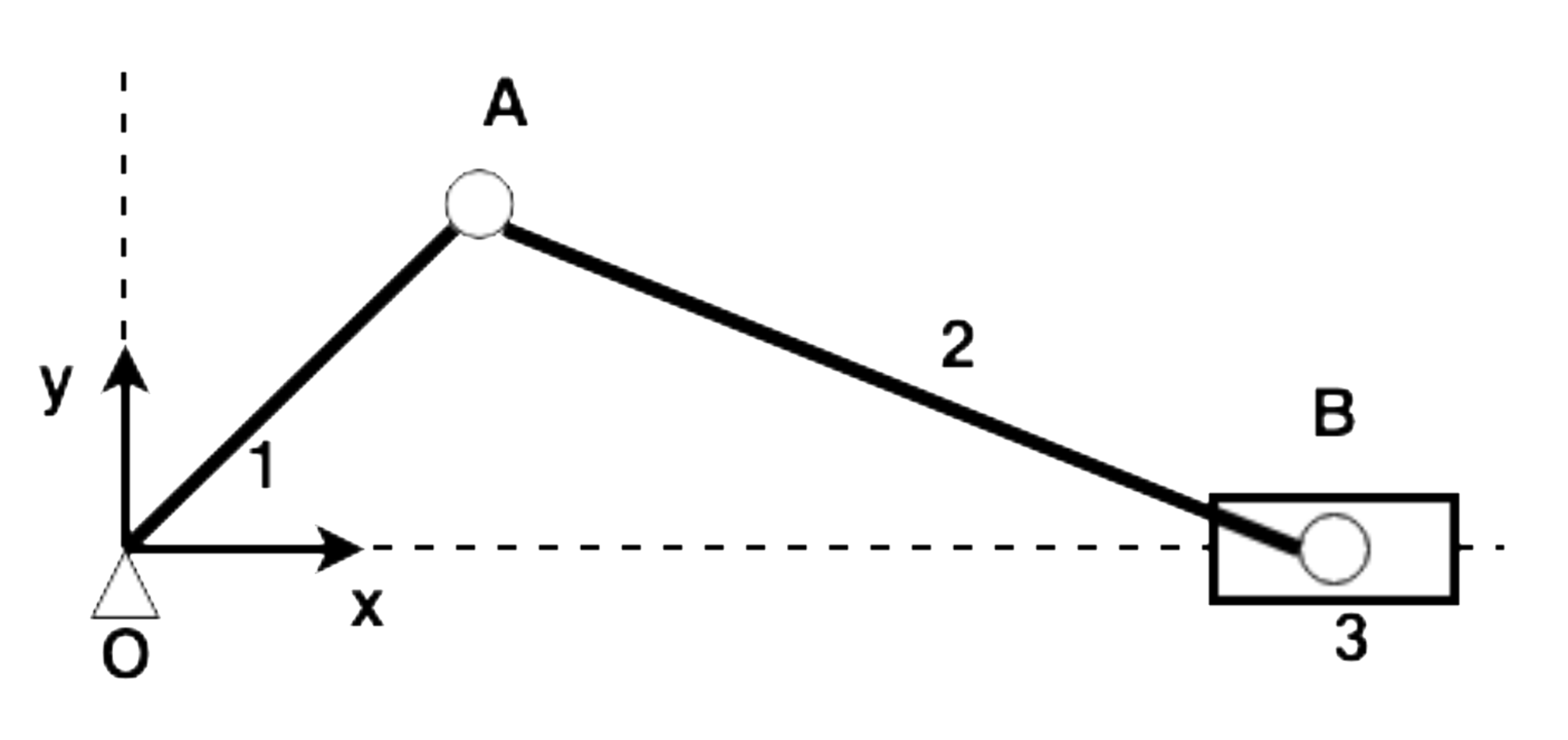
Consider the mechanism shown in the figure. The system comprises two rigid bodies named and respectively. The point mass numbered as can only translate along the X-axis. The system is linked by using appropriate hinges and joints. What is the number of degrees of freedom of this multi-body system?
Note:
- The small circles and triangles just indicate joints between bodies.
- Body 3, even though depicted as a rectangle is just a point mass.
- The motion of the system is confined to the X-Y plane.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
The number of degrees of freedom can also be thought of as the minimum number of coordinates needed to define the configuration of the system. The sliding block position is completely determined by the position of point A, and the position of point A depends only on a single angular parameter.
This kind of thinking is very useful when putting together Euler Lagrange equations . I suppose we could also say that the number of degrees of freedom is the number of unique variables contained within the system Lagrangian.