Slider-Crank Mechanism - Part 3
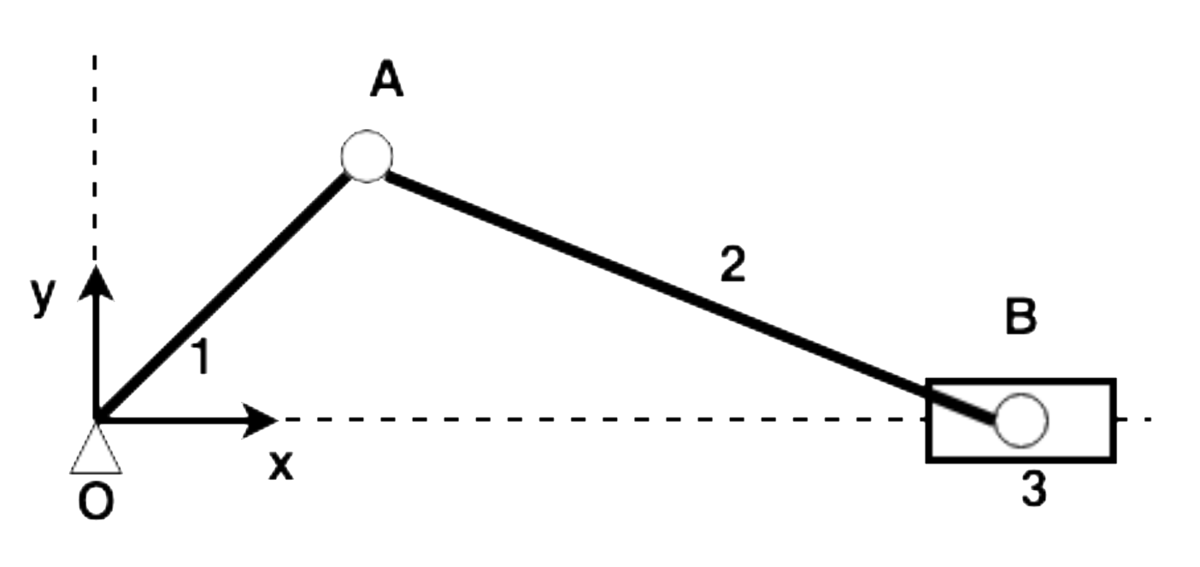
Consider the mechanism shown in the figure. The system comprises two rigid rods named and respectively. The point mass numbered as can only translate along the X-axis. The bodies are linked by using appropriate hinges and joints.
The centers of mass of rods lie at their geometric center. At the following instant:
The solver is required to find the point on body which has minimum speed. Enter your answer as the distance from point along the length of the rod .
Note:
- The small circles and triangles just indicate joints between bodies.
- The negative sign of indicates a clockwise rotation of body 1 about O.
- Body 3, even though depicted as a rectangle is just a point mass.
- The motion of the system is confined to the X-Y plane.
The answer is 0.1450.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
Let ( x , y ) be a point on rod 2 . The following relation generally holds:
x = x A + α ( x B − x A ) y = y A + α ( y B − y A ) 0 ≤ α ≤ 1
Time-differentiating gives:
x ˙ = x ˙ A + α ( x ˙ B − x ˙ A ) y ˙ = y ˙ A + α ( y ˙ B − y ˙ A ) 0 ≤ α ≤ 1
The speed is:
v = x ˙ 2 + y ˙ 2
For point A :
x A = O A cos θ y A = O A sin θ x ˙ A = − O A sin θ θ ˙ y ˙ A = O A cos θ θ ˙
For point B (from the previous problem):
x ˙ B ≈ 5 . 8 6 8 y ˙ B = 0
So we know the velocities of the two ends points. All that remains is to sweep the parameter α and see which value yields the smallest speed. As it turns out, α ≈ 0 . 3 6 2 5 yields the smallest speed, corresponding to a length of ≈ 0 . 1 4 5 from point A .