Spinning Table
An object of mass
M
=
1
0
k
g
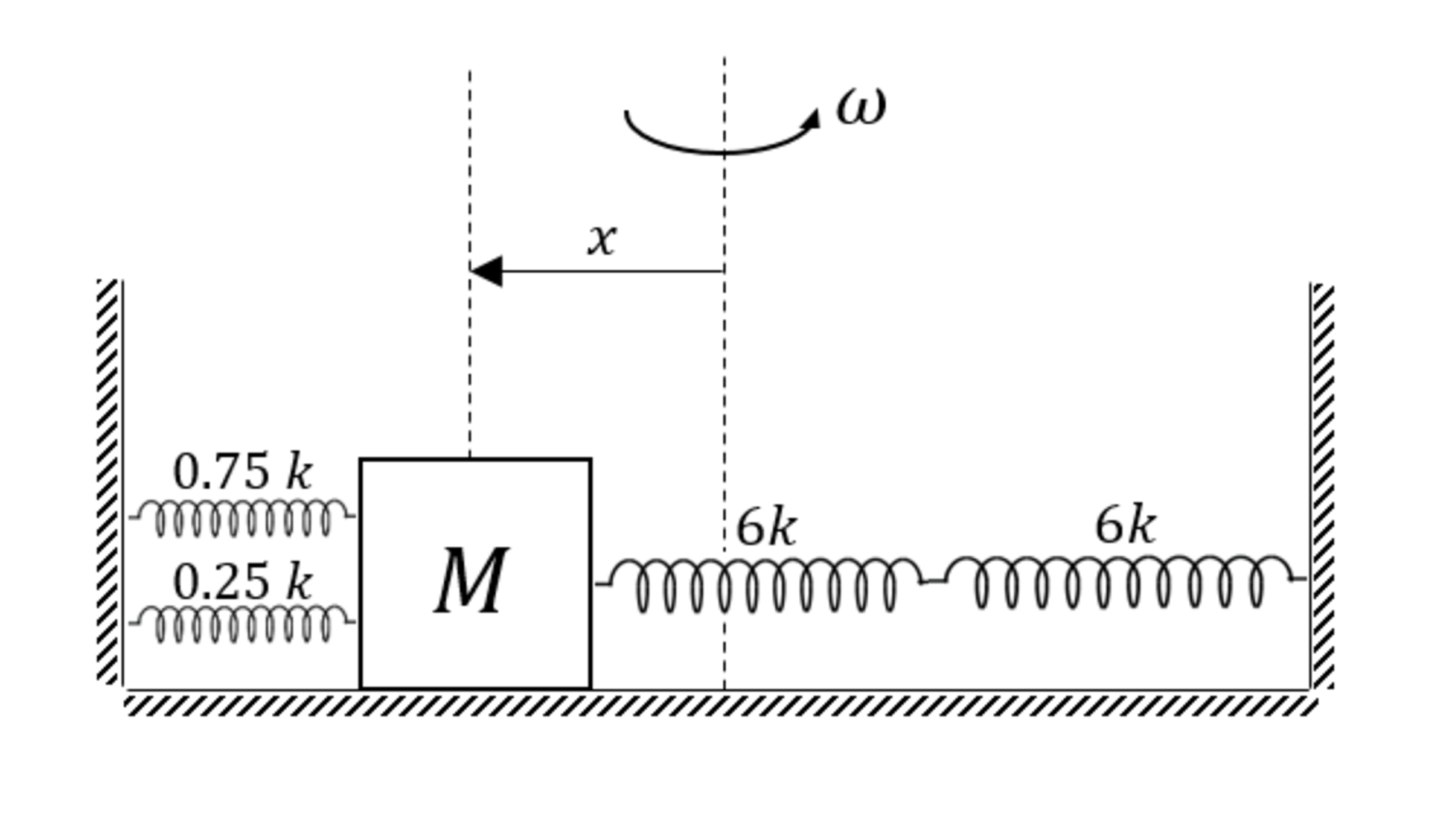
is placed on a smooth circular table. A system of springs is attached to the object as shown on the figure. The object is given displacement
x
from the equilibrium. This system is then rotated through the axis shown on the figure with angular velocity
ω
.
 Cross section of the table
Cross section of the table
The object will then oscillate with angular frequency ω o s c .
For a certain value of ω , it is also possible that the object remains stationary. Call this value Ω
Find the value of ∣ ω o s c − Ω ∣ (in rad/s)
Additional Info :
-
The axis of rotation passes through the center of table and is perpendicular to the table
-
k = 2 5 0 N / m
-
ω = 1 9 r a d / s
The answer is 1.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
That's a brilliant approach using lagrange method !
The spring system on the left simplifies to a single spring with spring constant k while the system on the right simplifies to a single spring with spring constant 3 k . Both of these springs then simplifies to a single spring with spring constant 4 k , because they are in a parallel configuration.
Two forces will work on the object, the spring force and the centrifugal force.
The free body diagram of the object :
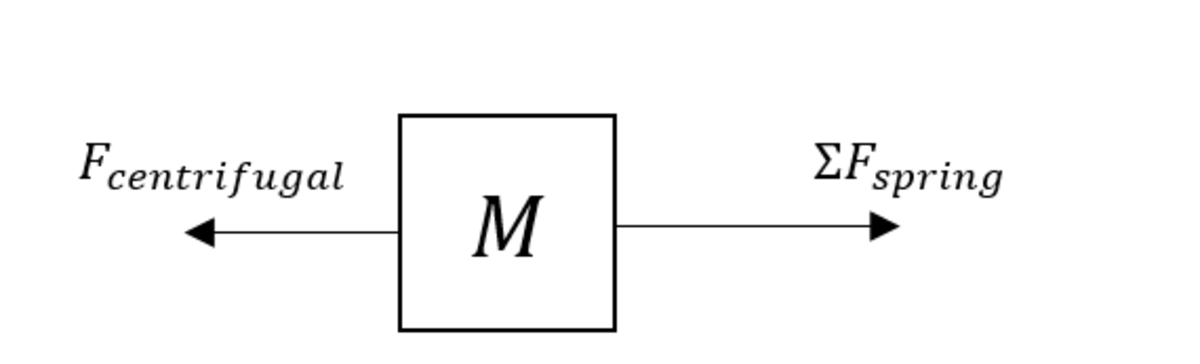
Newton's 2 n d law for the object :
− 4 k x + M ω 2 x = M x ¨
Dividing both sides with M ,
− ( M 4 k − ω 2 ) x = x ¨
This is a well-known differential equation, hence we have :
ω o s c = M 4 k − ω 2
and we can get the value of Ω by making ω o s c = 0 , giving :
Ω = M 4 k
Substitute the numerical values to get ω o s c = 9 r a d / s and Ω = 1 0 r a d / s
Hence, ∣ ω o s c − Ω ∣ = 1 r a d / s
The problem author's solution is the most efficient one. Just for fun, I will avoid explicitly invoking a centrifugal force by using Lagrange analysis. Assume that the center of the table is the origin of a 2 D coordinate system. The location of the mass on the table is given in polar coordinates as ( r , θ ) .
Kinetic energy:
T = 2 1 M ( r 2 θ ˙ 2 + r ˙ 2 )
Spring potential energy (with springs at equilibrium length for r = 0 ):
V = 2 1 4 3 k r 2 + 2 1 4 1 k r 2 + 2 2 1 ( 6 k ) ( 2 r ) 2 = 2 k r 2
Lagrangian:
L = T − V = 2 1 M ( r 2 θ ˙ 2 + r ˙ 2 ) − 2 k r 2
The equation of motion for the radial parameter is:
d t d ∂ r ˙ ∂ L = ∂ r ∂ L
Evaluating results in:
M r ¨ = M r θ ˙ 2 − 4 k r
Re-arranging a bit results in:
r ¨ = − ( M 4 k − θ ˙ 2 ) r
This corresponds to simple harmonic motion in r with angular speed ω o s c .
ω o s c = M 4 k − θ ˙ 2