Statics - Pendulum and Spring System
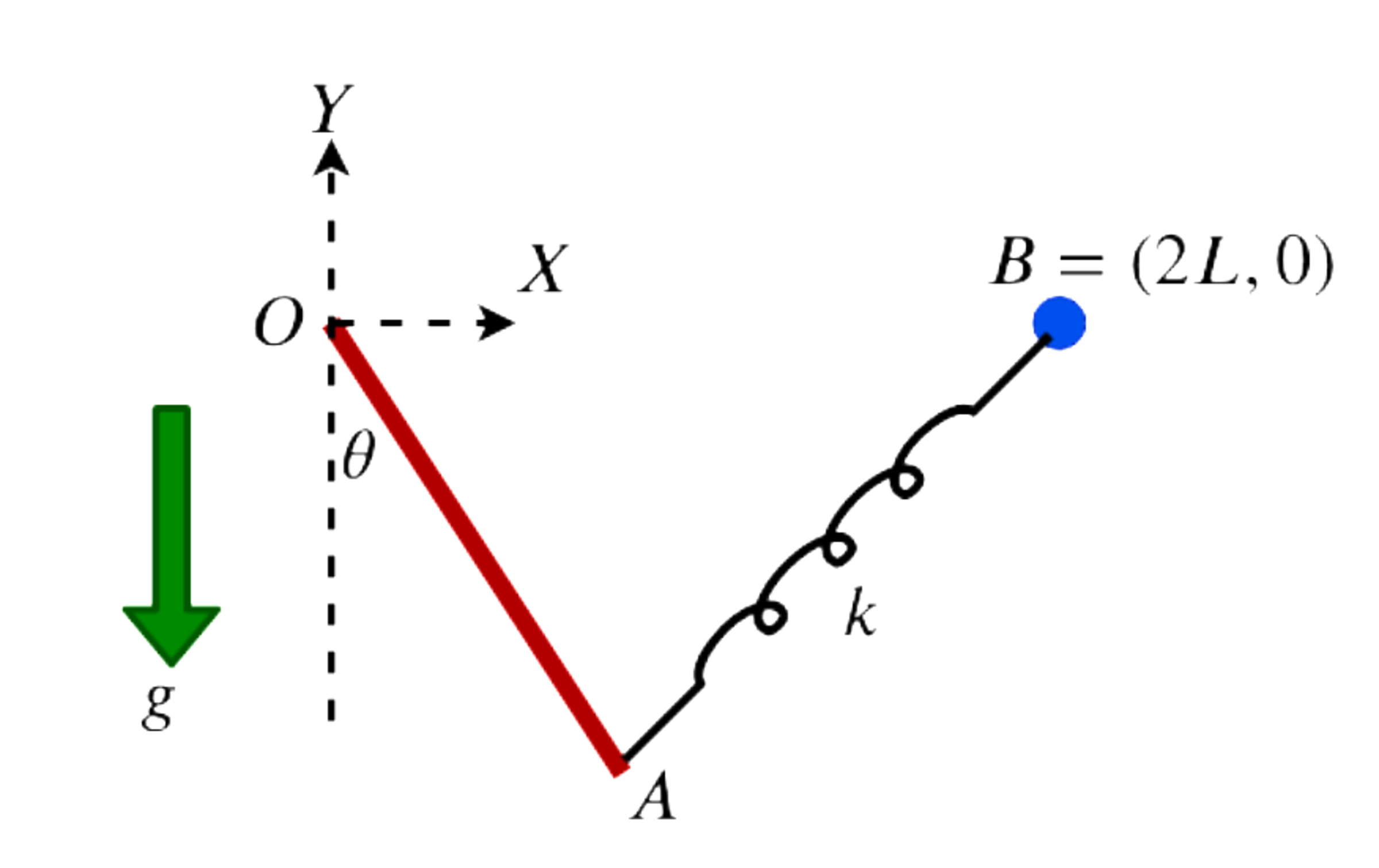
Consider a pendulum of length O A = L . The rod O A of mass m is a rigid body with uniform mass distribution. The hinged end O coincides with the origin of the coordinate axes. Gravity acts vertically downwards. A spring is attached between the end A of the pendulum and the fixed point in space B as indicated in the diagram. The given system is in equilibrium. Calculate the angle θ in degrees.
Note:
- L = 0 . 7 5 m ; g = 9 . 8 1 m / s 2 ; m = 2 k g ; k = 2 0 N / m .
- 0 < θ < 9 0 o
- The natural spring length is L o = L / 5 .
The answer is 68.3401.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
The length of the stretched spring, l , is obtained from the equation l 2 = ( 2 L − L sin θ ) 2 + L 2 cos 2 θ , or l = L 5 − 4 sin θ . The force exerted on the lower end of the rod along the spring is, therefore, given by F = k L ( 5 − 4 sin θ − 5 1 ) . The angle between the rod and the spring, α , is given by sin α = 5 − 4 sin θ 2 cos θ . Balancing moments of the weight of the rod and the spring force about the top end of the rod we get 1 9 6 0 4 6 . 6 8 9 7 6 6 5 6 sin 6 θ − 4 8 7 2 5 8 . 8 9 7 2 1 6 4 sin 5 θ − 5 1 4 5 0 . 6 1 1 2 3 9 7 5 sin 4 θ + 8 7 9 4 8 5 . 3 7 2 8 sin 3 θ − 3 8 5 9 2 4 . 2 1 6 sin 2 θ − 3 9 6 8 0 0 sin θ + 2 4 6 0 1 6 = 0 . The two positive real solutions of this equation are θ = 6 8 . 3 4 0 1 ° and θ = 7 4 . 5 9 8 ° . The value satisfying the conditions of the problem is 6 8 . 3 4 0 1 °
I have attached simulation code below. The code sweeps the angle and looks for the angle which minimizes the net torque on the rod. I have also attached a plot of torque vs angle.