Stationary point between sun and earth
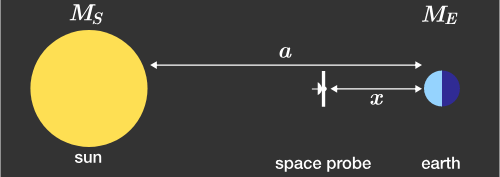
There is a special point between Sun and Earth where a spacecraft can be parked, so that it always remains directly between them, at a fixed distance x from Earth, as Earth rotates around the Sun. A spacecraft can remain at this point without using any thrust.
What is the distance x of this point from the Earth in gigameters? ( 1 gigameter = 1 0 6 km )
Details and Assumptions:
- The masses of the Earth and the Sun have a ratio of 1 : 3 3 3 , 0 0 0 .
- The distance between the Earth and the Sun is a ≈ 1 5 0 ⋅ 1 0 6 km .
- The radii of the Earth and the Sun are negligibly small.
The answer is 1.5.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
There's no indication in the question that the spacecraft must stay in equilibrium during all the year.
Log in to reply
"A spacecraft parked at this point remains static relative to the sun and the earth" wouldn't be enough to indicate that the position is static in the rotating reference frame?
"...it always remains directly between them, at a fixed distance from Earth, as Earth rotates around the Sun"
There's no indication that it must remain in between them "all the year" and not for just a given time.
The statement of this problem explicitly asks what is the point at which the gravitational forces of the sun and the earth are balanced. Therefore it does not seem that the centrifugal force should have a part in the solution, unless the statement is modified.
I think there should be better indication that rotational effects were expected to be accounted for.
Log in to reply
So many physics problems are trick questions where we have to guess what to account for and what to ignore.
The spacecraft is at the Sun and Earth's first Lagragian Point , whose location is defined by
( R − r ) 2 M 1 = r 2 M 2 + R 2 M 1 − R 3 r ( M 1 + M 2 )
where r is the distance of the point from the smaller object, R is the distance between the two main objects, and M 1 and M 2 are the masses of the large and small object, respectively. In this problem, r = x , R = a = 1 5 0 ⋅ 1 0 6 km, and M 1 = 3 3 3 0 0 0 M 2 , so
( 1 5 0 ⋅ 1 0 6 − x ) 2 3 3 3 0 0 0 M 2 = x 2 M 2 + ( 1 5 0 ⋅ 1 0 6 ) 2 3 3 3 0 0 0 M 2 − ( 1 5 0 ⋅ 1 0 6 ) 3 x ( 3 3 3 0 0 0 M 2 + M 2 )
which solves to x ≈ 1 4 9 5 4 8 0 km or x ≈ 1 . 5 ⋅ 1 0 6 km
The only reason I knew the answer to this question is because I'm familiar with the James Webb Space Telescope, which is going to be placed in this Lagrangian Point, 1.5 million km from Earth. I still have a lot to learn if I'm going to figure this out on my own...
As David Vreken already stated, the point asked for is a Lagrangian Point . But how can we find it?
We start with the Lagrangian of a three-body system, which is the difference of the kinetic and the potential energies,
L ( r , R 1 , R 2 ) = 2 m r ˙ 2 + 2 M 1 R ˙ 1 2 + 2 M 2 R ˙ 2 2 + G ∣ r − R 1 ∣ m M 1 + G ∣ r − R 2 ∣ m M 2 + G ∣ R 1 − R 2 ∣ M 1 M 2 ,
where the M 1 > M 2 ≫ m are the masses of the three bodies (i.e. sun, earth and an object with negligible mass compared to the former) sitting at positions R 1 , R 2 and r . G is the gravitational constant and ⋅ denotes the time derivative, that is, r ˙ = v is the velocity of the object at position r .
As we all know, the earth is traveling around the sun. In fact, the sun is also moving, since both objects are rotating around their center of mass (CM). Therefore, it is convenient so switch into the rotating frame, that is, the coordinate system which is rotating with the same angular velocity ω (see below).
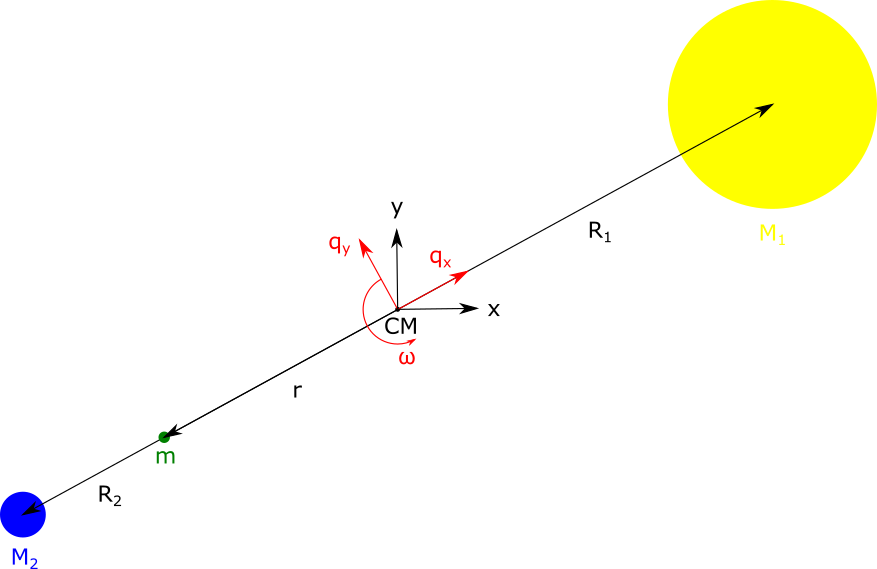 The three-body problem: Two objects with masses
M
1
and
M
2
are rotating around their center of mass (CM) at angular velocity
ω
. The third object is a probe with negligible mass
m
≪
M
1
,
M
2
. The cartesian coordinates are given by
(
x
,
y
)
. The rotating frame is given by
(
q
x
,
q
y
)
.
The three-body problem: Two objects with masses
M
1
and
M
2
are rotating around their center of mass (CM) at angular velocity
ω
. The third object is a probe with negligible mass
m
≪
M
1
,
M
2
. The cartesian coordinates are given by
(
x
,
y
)
. The rotating frame is given by
(
q
x
,
q
y
)
.
The transformation between the coordinates ( x , y ) and ( q 1 , q 2 ) is given by a rotation
x y = q x cos ω t + q y sin ω t , = − q x sin ω t + q y cos ω t .
With some calculation we find that
∣ r i − r j ∣ = ( x i − x j ) 2 + ( y i − y j ) 2 = ( q x , i − q x , j ) 2 + ( q y , i − q y , j ) 2 = ∣ q i − q j ∣
and
r ˙ i 2 = x ˙ 2 + y ˙ 2 = q ˙ x , i 2 + q ˙ y , i 2 + ω 2 ( q x , i 2 + q y , i 2 ) + 2 ω ( q ˙ x , i q y , i − q x , i q ˙ y , i ) = q ˙ i 2 + ω 2 q i 2 + 2 ω q ˙ i × q i .
Note: Multiplication of the last line by a mass and division by two (that is how they appear in the Lagrangian) we find some familiar terms. The first term is simply the kinetic energy in the rotating frame. The second term is the centrifugal force , an fictitious force felt by a rotating observer. The last term is the Coriolis force , another fictitious force.
To make life easier, we will make some simplifications before plugging these results into the Lagrangian. Since the masses M 1 and M 2 are rotating around the CM, we can fix them to the q x -axis in the rotating coordinate system, i.e. Q y , 1 = Q y , 2 = 0 and Q ˙ y , 1 = Q ˙ y , 2 = 0 . Since the (Lagrangian) point we are looking for is on the line connecting M 1 and M 2 , the same holds for the object of mass m : q y = q ˙ y = 0 .
Now, the Lagrangian in terms of the rotating coordinates and corresponding to the given problem reads
L ( q x , Q x , 1 , Q x , 2 ) = 2 m q ˙ x 2 + 2 m ω 2 q x 2 + 2 M 1 Q ˙ x , 1 2 + 2 M 1 ω 2 Q x , 1 2 + 2 M 2 Q ˙ x , 2 2 + 2 M 2 ω 2 Q x , 2 2 + G ∣ q x − Q x , 1 ∣ m M 1 + G ∣ q x − Q x , 2 ∣ m M 2 + G ∣ Q x , 1 − Q x , 2 ∣ M 1 M 2 .
The equations of motion for m , M 1 and M 2 can be calculated via the Euler-Lagrange equations , which yields
d t d ( ∂ q ˙ x ∂ L ) = m q ¨ x d t d ( ∂ Q ˙ x , 1 ∂ L ) = M 1 Q ¨ x , 1 d t d ( ∂ Q ˙ x , 2 ∂ L ) = M 2 Q ¨ x , 2 = m ω 2 q x + G ∣ q x − Q x , 1 ∣ 3 m M 1 ( q x − Q x , 1 ) + G ∣ q x − Q x , 2 ∣ 3 m M 2 ( q x − Q x , 2 ) = ∂ q x ∂ L , = M 1 ω 2 Q x , 1 − G ∣ q x − Q x , 1 ∣ 3 m M 1 ( q x − Q x , 1 ) + G ∣ Q x , 1 − Q x , 2 ∣ 3 M 1 M 2 ( Q x , 1 − Q x , 2 ) = ∂ Q x , 1 ∂ L , = M 2 ω 2 Q x , 2 − G ∣ q x − Q x , 2 ∣ 3 m M 2 ( q x − Q x , 2 ) − G ∣ Q x , 1 − Q x , 2 ∣ 3 M 1 M 2 ( Q x , 1 − Q x , 2 ) = ∂ Q x , 1 ∂ L .
Since we assumed that M 1 and M 2 , i.e. the sun and the earth, are rotating with angular velocity ω , their orbits should be stable and their centripetal forces should match the gravitational force. In that case, Q ¨ x , 1 = Q ¨ x , 2 = 0 . Furthermore, we are looking for the point where any object of mass m is stationary as well, such that q ¨ x = 0 .
By indentifying a = Q x , 1 − Q x , 2 , x = q x − Q x , 2 and a − x = Q x , 1 − q x we obtain
( a − x ) 2 M 1 = x 2 M 2 + G ω 2 q x
from the first line, which is independent of the mass m . Analogously we find
− G ω 2 Q x , 1 G ω 2 Q x , 2 = Q x , 2 M 2 + ≈ 0 x 2 m , = Q x , 1 M 1 + ≈ 0 ( a − x ) 2 m
from the second and third lines, respectively. Since the mass m is negligible in comparison with M 1 and M 2 , we can neglect the last terms.
The second equation gives us an expression for Q x , 2 (which we will need in a moment),
Q x , 2 = − M 1 + M 2 M 1 a ,
and adding both equations and dividing by a gives us an expression for ω ,
G ω 2 = − a 3 M 1 + M 2 .
Now we can plug this relation into the equation above (the one obtained from the equation of motion for q x ):
( a − x ) 2 M 1 = x 2 M 2 − a 3 M 1 + M 2 q x = x 2 M 2 − a 3 M 1 + M 2 Q x , 2 − a 3 M 1 + M 2 x .
With the relation for Q x , 2 we calculated above we finally obtain
( a − x ) 2 M 1 = x 2 M 2 + a 2 M 1 − a 3 M 1 + M 2 x ,
which is a fifth order equation for x . Thus, without approximations we cannot determine x analytically.
Note: In contrast to the two-body problem, the three-body problem is analytically not solvable anymore.
By setting M 1 / M 2 = M S / M E = 3 3 3 , 0 0 0 and a = 1 5 0 G m we can solve
x 2 1 + M 2 M 1 a 2 1 − ( M 2 M 1 + 1 ) a 3 x − M 2 M 1 ( a − x ) 2 1 = 0
numerically with ease. Using Newton's method we find x ≈ 1 . 4 9 5 4 7 9 8 9 6 9 5 4 3 9 0 3 G m .
Excellent......
The earth orbits the sun sun in a distance a with the angular velocity Ω = 2 π / year . For this orbit, the gravitational force of the sun and the centrifugal force must be in balance: F g = a 2 G M E M S ⇒ Ω 2 = M E Ω 2 a = F cf = a 3 G M S The spacecraft orbits the sun at the same angular velocity Ω , so that it remains static relative to the sun and earth. The sun and the earth exert gravitational forces on the spacecraft. In addition, the centrifugal force acts on the spacecraft. In equilibrium ⇒ F g ( a − x ) 2 G m M S − x 2 G m M E = F cf = m Ω 2 ( a − x ) = a 3 G m M S ( a − x ) Assuming that the distance x is small compared to the Sun-Earth distance ( x ≪ a ), we can make a linear Taylor expansion of the 1st term: ⇒ ⇒ ⇒ ( a − x ) 2 1 a 2 G m M S + 2 a 3 G m M S x − x 2 G m M E a 3 3 G m M S x x ≈ a 2 1 + 2 a 3 x + O ( a 2 x 2 ) ≈ a 3 G m M S ( a − x ) ≈ x 2 G m M E ≈ 3 3 M S M E ⋅ a ≈ 3 9 9 9 , 0 0 0 1 ⋅ a ≈ 3 1 0 − 6 ⋅ a = 1 0 − 2 ⋅ a = 1 . 5 ⋅ 1 0 6 km