The rolling starts now...
A uniform wheel(disc) of radius was set rotating about its axis at an angular speed . Now it is carefully placed on a rough horizontal surface of friction coefficient with its axis horizontal. Because of friction the wheel accelerates forward and its rotation decelerates till the wheel starts pure rolling. If the time after which pure rolling starts on the surface is given by then find .
The answer is 4.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
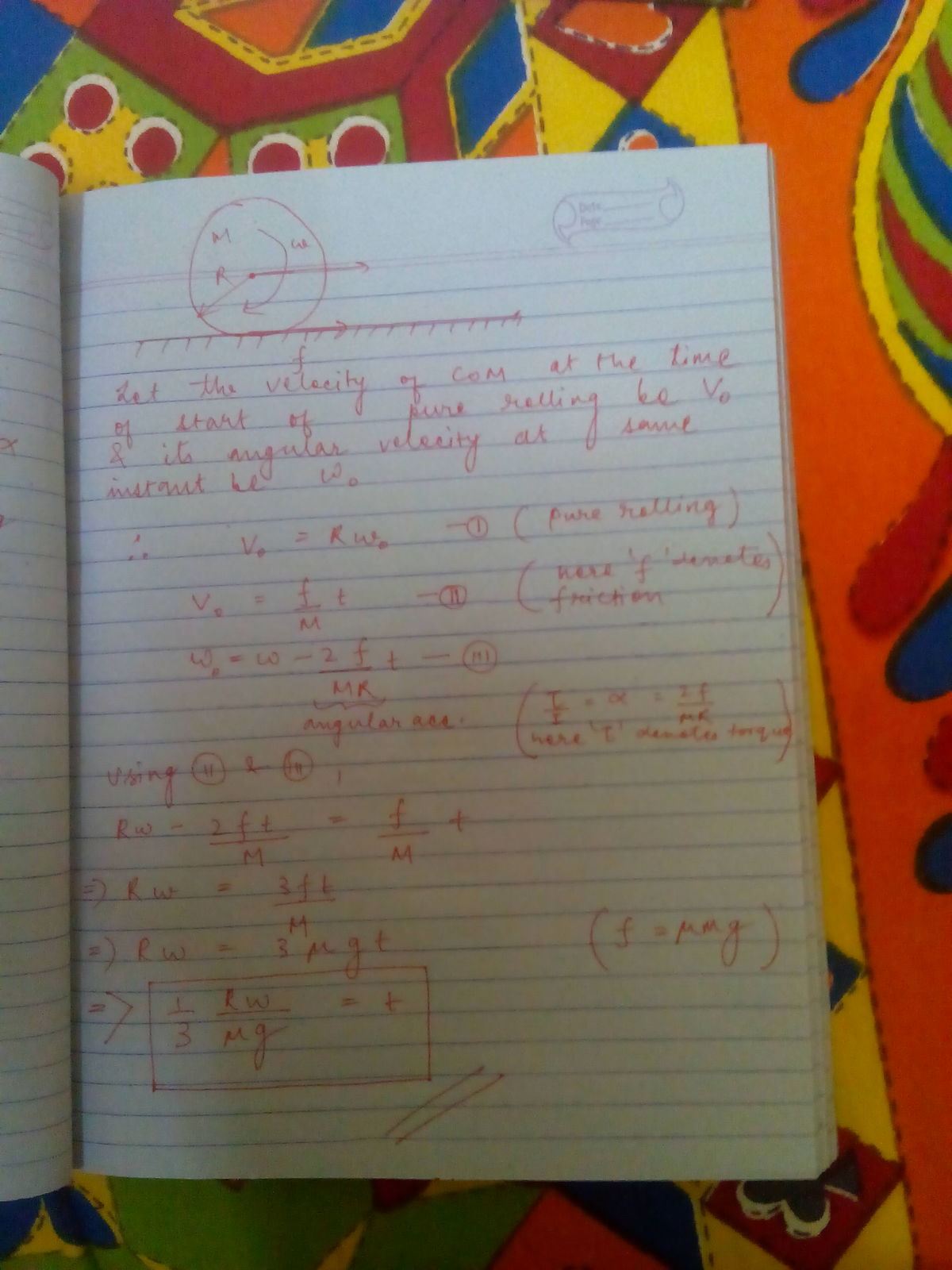
L e t t h e m a s s o f t h e w h e e l m e ′ M ′ . I t ′ s r a d i u s i s ′ R ′ a n d i t ′ s a n g u l a r v e l o c i t y i s ′ ω ′ . L e t i t r o t a t e i n t h e c l o c k w i s e d i r e c t i o n . S i n c e t h e f r i c t i o n ( f ) d e c e l e r a t e s t h e r o t a t i o n , s o , i t ′ s d i r e c t i o n i s t o w a r d s r i g h t , a n d t h u s t h e b o d y a c c e l e r a t e s t o w a r d s r i g h t . L e t ′ s i t a n g u l a r a c c e l e r a t i o n i s ′ α ′ a n d i t ′ s l i n e a r a c c e l e r a t i o n i s ′ a ′ . U s i n g t h e i n f o . f o r t r a n s l a t i o n a l m o t i o n , f = M a − − − 1 . U s i n g t h e i n f o . f o r r o t a t i o n a l m o t i o n , τ = I α w h e r e τ i s t h e a p p l i e d t o r q u e a n d I i s t h e m o m e n t o f i n e r t i a . R ( f ) = 2 M R 2 α U s i n g 1 . R ( M a ) = 2 M R 2 α a = 2 R α α = R 2 a B u t f r i c t i o n f = μ M g T h e r e f o r e , a = μ g S o , α = R 2 μ g
N o w , w r i t i n g t h e e q u a t i o n f o r t r a n s l a t i o n a l m o t i o n , t h e w h e e l ′ s v e l o c i t y a f t e r t i m e ′ t ′ = v f = v i + a t v f = 0 + μ g t v f = μ g t − − − − − − 2 . F o r r o t a t i o n a l m o t i o n , t h e w h e e l s a n g u l a r v e l o v i t y , a f t e r t i m e ′ t ′ = ω f = ω i − α t ω f = ω − R 2 μ g t − − − 3 . B u t , f o r p u r e r o l l i n g , v f = R ω f U s i n g 2 . & 3 . μ g t = R ( ω − R 2 μ g t ) μ g t = R ω − 2 μ g t 3 μ g t = R ω t = 3 1 μ g R ω C o m p a r i n g w i t h t h e g i v e n e q u a t i o n , a = 1 , b = 3 a + b = 4