Vibrating alert
A mobile phone lies on a flat, smooth, frictionless surface and is vibrated by the vibrating alert. The mobile phone rotates about its own axis so that the rotation angle performs a harmonic oscillation: What is the magnitude of the vibration amplitude?
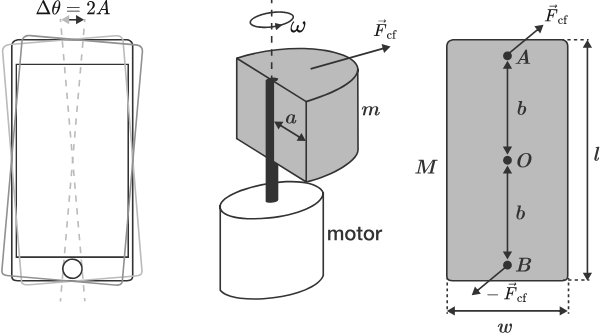
Details and Assumptions: In a vibrating mobile phone move small motors, which put an imbalance with the mass in rapid rotation. The imbalance has the shape of a half-cylinder with radius , which rotates about the full-cylinder axis. Since the center of gravity of the half-cylinder is not in the axis of rotation, a centrifugal force acts on the engine. One motor is attached to the points and at a distance of from the center of gravity of the mobile phone. We assume that the motors both rotate counterclockwise and have an angular velocity of . The motors are opposite to each other aligned, so that a pure torque acts on the mobile phone. Assume that the mobile phone has the shape of a rectangle with width and length and a mass of
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
We assume, that at time t = 0 the unbalance of a vibration motor is aligned along the x-axis. On a mass element Δ m of the unbalance at the position r a centrifugal force acts due to the rotation around the origin Δ F cf = Δ m ω 2 r = Δ m ω 2 ( r cos φ r sin φ ) The total force on the total imbalance results from integration over the semicircular surface: F cf = ∫ d F cf = ∫ ω 2 r d m = 2 1 π a 2 m ∫ ω 2 r d A = 2 1 π a 2 m ∫ 0 a [ ∫ − π / 2 π / 2 ω 2 r ( cos φ sin φ ) ⋅ r d φ ] d r = 2 1 π a 2 m ω 2 ∫ − π / 2 π / 2 ( cos φ sin φ ) d φ ⋅ ∫ 0 a r 2 d r = 2 1 π a 2 m ω 2 ( 2 0 ) ⋅ 3 1 a 3 = 3 π 4 m ω 2 a e x As a function of time, there is a centrifugal force F cf ( t ) = 3 π 4 m ω 2 a ( cos ω t sin ω t ) The forces F cf and − F cf at the points A and B exert a torque T on the mobile phone: T = b e y × F cf + ( − b e y ) × ( − F cf ) = − 3 π 8 m ω 2 a b cos ( ω t ) ⋅ e z The rotational movement of the mobile phone obeys the equation I θ ¨ e z = T with the moment of inertia I , which is calculated by integration over the rectangular area of the mobile phone I = ∫ r 2 d M = w l M ∫ − l / 2 l / 2 ∫ − w / 2 w / 2 ( x 2 + y 2 ) d x d y = w l M ( ∫ − w / 2 w / 2 x 2 d x ⋅ ∫ − l / 2 l / 2 d y + ∫ − w / 2 w / 2 d x ⋅ ∫ − l / 2 l / 2 y 2 d y ) = w l M ( 3 2 ( 2 w ) 3 ⋅ l + w ⋅ 3 2 ( 2 l ) 3 ) = 1 2 M ( w 2 + l 2 ) The equation of motion for the rotation angle yields: ⇒ ⇒ d t 2 d 2 θ ( t ) θ ( t ) A = I T ( t ) = − π 3 2 M m w 2 + l 2 a b ω 2 cos ( ω t ) = π 3 2 M m w 2 + l 2 a b cos ( ω t ) = π 3 2 M m w 2 + l 2 a b ≈ 6 ⋅ 1 0 − 5