Wedge, Block, and Spring
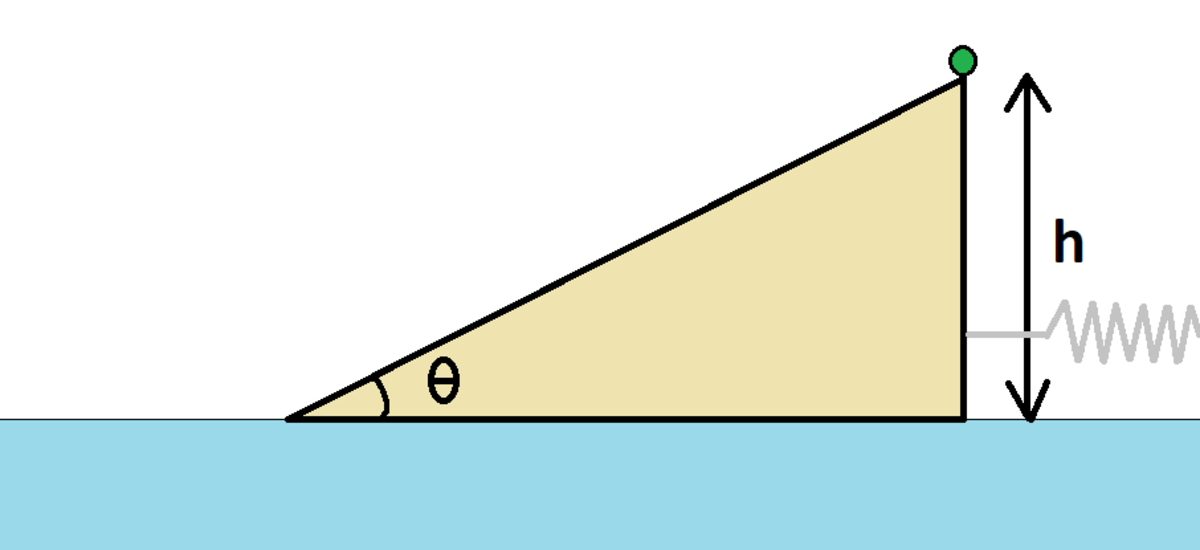
A triangular wedge has height h and mass M , and it makes an angle θ with the horizontal. The wedge sits on a smooth horizontal surface, and can slide freely on the surface. The right side of the wedge is connected to a horizontal spring of force constant k . The ambient gravitational acceleration g is downward.
There is a block of mass m on the slanted part of the wedge, where it can slide freely. Initially, both the block and the wedge are at rest, the block is at the top of the wedge, and the spring is at its natural length.
When the block gets to the bottom of the wedge, how far is the wedge from its initial position?
Details and Assumptions:
1)
h
=
1
0
2)
M
=
1
3)
θ
=
π
/
6
4)
m
=
1
5)
g
=
1
0
6)
k
=
4
7)
Assume that the block is confined to the surface of the wedge
The answer is 0.806.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
@Steven Chase
Sir I am planning to post a good question, but I am not able to solve, will you help me???
Please reply.
@Steven Chase sir I have uploaded a new problem.
I considered the X-axis to be placed horizontally to the left and the Y-axis vertically upwards. The origin is at the initial position of the wedge.
The coordinates of the wedge at any instant of time are ( x 1 , y 1 ) = ( x , 0 )
Let the distance moved downward by the block along the hypotenuse be s , then the coordinates of the block are:
( x 2 , y 2 ) = ( h − s sin θ , x + s cos θ )
The kinetic and potential energies of the system are:
T = 2 1 M ( x ˙ 1 2 + y ˙ 1 2 ) + 2 1 m ( x ˙ 2 2 + y ˙ 2 2 ) V = m g y 2 + 2 k x 2
The Lagrangé equations give two linear differential equations as such:
x ¨ = − 5 1 6 x − 2 3 s ¨ = 5 8 3 x + 8
Now:
x ( 0 ) = s ( 0 ) = x ˙ ( 0 ) = s ˙ ( 0 ) = 0
Applying and solving:
x = 8 5 3 ( cos ( 5 4 t ) − 1 )
The solution for s can be obtained by substituting x into the equation for s ¨ and double integrating twice. This gives:
s = − 1 6 1 5 cos ( 5 4 t ) − 4 0 t 2 − 1 5
A plot of s vs. x as plotted by @Steven Chase will give the required answer. However, the plot will be scaled by -1 in this case as I chose the axes to be differently oriented.
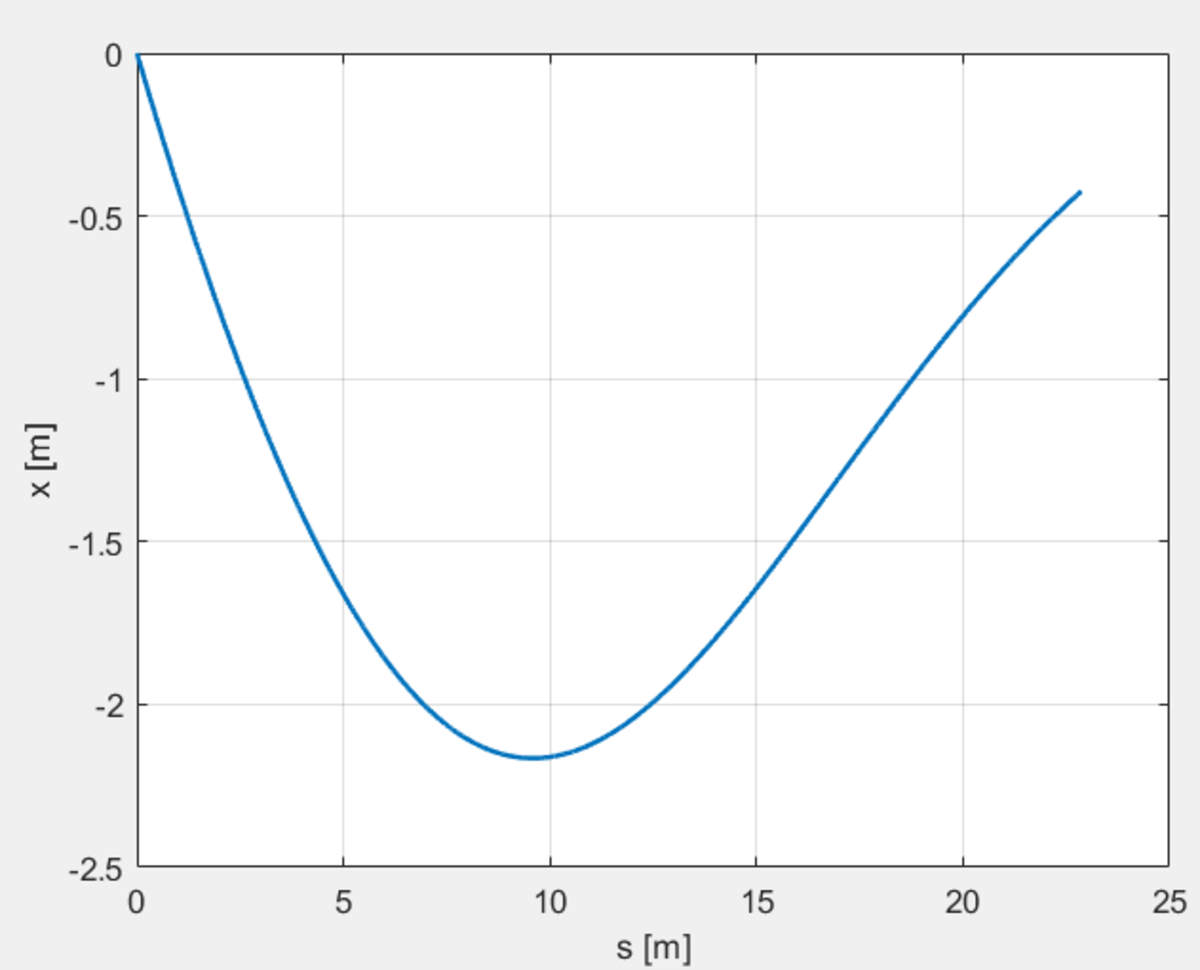
Solution edited and plot has been added as well.
Let the horizontal coordinate of the bottom left vertex of the wedge be x 0 . Let the distance of the block up the ramp be α . The coordinates of the block are:
x = x 0 + α cos θ y = α sin θ
Let x 0 = 0 be the initial location of the wedge. The kinetic energy, potential energy, and lagrangian are:
T = 2 1 m ( x ˙ 0 2 + 2 cos θ x ˙ 0 α ˙ + α ˙ 2 ) + 2 1 M x ˙ 0 2 V = m g α sin θ + 2 1 k x 0 2 L = T − V = 2 1 m ( x ˙ 0 2 + 2 cos θ x ˙ 0 α ˙ + α ˙ 2 ) + 2 1 M x ˙ 0 2 − m g α sin θ − 2 1 k x 0 2
Equations of motion:
d t d ∂ x ˙ 0 ∂ L = ∂ x 0 ∂ L d t d ∂ α ˙ ∂ L = ∂ α ∂ L
Evaluating the equations of motion results in:
( m + M ) x ¨ 0 + m cos θ α ¨ = − k x 0 m cos θ x ¨ 0 + m α ¨ = − m g sin θ
Solve for both second derivatives on each time step of a numerical simulation routine. The initial conditions are:
x 0 = 0 x ˙ 0 = 0 α = sin θ h α ˙ = 0
Plots of x 0 and α over time are given below. The simulation is run until α = 0 .
Simulation code: