Solve if You can ( Mechanics )
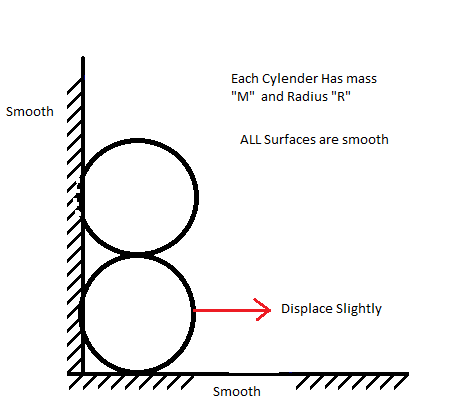
As shown in figure there is Two Identical Cylinders each of mass "M" and Radius "R". Now If Lower cylinder is displace slightly to the rightward direction then, Find The maximum Velocity of each Cylinder ?
All Surfaces are smooth.
Gravity is in downward direction as usual.
Please Post Solution Instead of posting answers.
Update:
Repeat this question if there is friction between the cylinders.
And Then Try question based on it Click here
Note by
Deepanshu Gupta
6 years, 7 months ago
No vote yet
1 vote
Easy Math Editor
This discussion board is a place to discuss our Daily Challenges and the math and science related to those challenges. Explanations are more than just a solution — they should explain the steps and thinking strategies that you used to obtain the solution. Comments should further the discussion of math and science.
When posting on Brilliant:
*italics*or_italics_**bold**or__bold__paragraph 1
paragraph 2
[example link](https://brilliant.org)> This is a quote# I indented these lines # 4 spaces, and now they show # up as a code block. print "hello world"\(...\)or\[...\]to ensure proper formatting.2 \times 32^{34}a_{i-1}\frac{2}{3}\sqrt{2}\sum_{i=1}^3\sin \theta\boxed{123}Comments
Here is my method when friction is present between only cylinders. By using concept of Instantaneous centre of rotation [ ICR ]
Because This system is an equivalent Rigid Body. Since There is no relative motion between point of contact of cylinder.
The whole system is assumed to be purely rotated about "O"
Then
so velocity of any point P of this combined system in ICR ( O ) frame is given By
Vp/o=rp/0×ω0.
V1=(2Rcosθ)ω0V2=(2Rsinθ)ω0⇒ω0=2RV12+V22.
Now using energy conservation of system in ICR frame we get
2gR(1−cosθ)=21Ioω02⟶(1)Io=mR2+mR2+4mR2cos2θ+4mR2sin2θIo=6mR2⇒ω0=3R2g(1−cosθ)⟶(2)V12=38gR(1−cosθ)cos2θ⟶(3)V22=38gR(1−cosθ)sin2θ⟶(4).
Now using maxima concept on velocity of cylinder - 1 ( Lower Cylinder )
dθd(V12)=0θ=cos−132Orθ=0×(rejeccted)Orθ=2π×(rejected).
So again cylinder will loose contact at the same hight as that of in 1st Part of this question ( when no friction ) I rejected other values of angle because velocity of lower cylinder never be zero. which we have discuss earlier. And Now Further Motion is independent
So we get maximum velocity of lower block
V1,max=8132gR.
Now velocity of 2nd cylinder can be easily calculated.
Log in to reply
I don't think that I am at that level to check your solution. But I have tried to solve the question and I got the same value of v1. Here is my solution.
As rω2−v2sinθ=rω1+v1cosθ
and ω2=−ω1.
So ω1=2rcosθv1
and ω2=−2rcosθv1
By energy conservation
mg2r(1−cosθ)=21mv12+21v22+21Iω12+21Iω22
On putting the values
g2r(1−cosθ)=2cos2θv12+4cos2θv12
and v12=38gr(1−cosθ)cos2θ.
I got the same expression of v1.
Deepanshu and Mvs ,what you guys think about my method. Is this correct?
Log in to reply
your answer as far as i can comprehend seems absolutely correct
Log in to reply
Please clear my last confusion. I have found that α1=−α2 but how do we show ω1=−ω2
I have tried
as α1=−α2
so dtdω1=−dtdω2
or ∫dω1=−∫dω2
or ω1=−ω2+C
At t=0 ω1=ω2=0 So C=0
So ω1=−ω2
Is that how you proved ω1=−ω2?
@Mvs Saketh and @DEEPANSHU GUPTA please reply.
Log in to reply
I think we are wrong with the rotational part,, please observe carefully,, i have been pondering over this contradiction for long and hence i have not posted any solution when rotation comes into play,,
heres what we have
w1=w2
also that rw1−v2sinθ=rw1+v1cosθ
as w1=w2 so rw1=rw2, thus cancelling like terms
−v2sinθ=+v1cosθ...(1)
now already through translatory constraint
we have v2cosθ=+v1sinθ...(2)
dividing one and 2 , we get
tanθ=−cotθ which is not true for all angles,, clearly we are wrong,, i do not know where,, i do now know how,, but i would say we are wrong,, this is giving contradictory results,, either this means that such a situation is not possible or that we are missing something
@DEEPANSHU GUPTA @satvik pandey
Log in to reply
The equation is rω2−v2sinθ=rω1+v1sinθ (I think you typed it wrong there. You wrote w1 instead of w2) and also ω1=−ω2 (you missed that minus sign). If I am not wrong I think you are getting this result due to wrong signs.
Log in to reply
no w1=w2 is okay i am comparing magnitudes,, but yes wrong signs actually i do not know yet whether rw2 greater or v2 sin(x) so my contradiction arises because i am assuming rw2 is greater and the contradiction shows that such a case is never possible
Saketh you have done mistake in calculation of Constrained ..!! Check again !!
And Satvik your solution is Partially incorrect. !!
See carefully What is I'am Trying to Saying ...!!
Now Since Cylinder are Rolling without slipping so There is no relative motion along common Tangent.
ω2R−V2sinθ=V1cosθ−ω1R...........(1).
Now Since Rod is Rigid So there is no relative motion between cylinders along Common Normal .
V2cosθ=V1sinθ.................(2).
Now By writing Torque equation we get :
α1=IfR(Anticlockwise)α2=IfR(AntiClockwise)α1=α2.
Now after integrating it and put limits we get
ω1=ω2........................(3).
So @satvik pandey Your Method is incorrect . But Your Final expression for V1. as a function of theta is correct .
Because in energy equation :
(−ω1)2=(ω1)2.
And If You want more Rigorous Proof of the fact that
ω1=ω2.
Then I would say that In My solution I used ICR .. and calculate ωICR=ω0.
Note That this system ( both cylinder ) is considers as rigid Body ( not discrete because there is no relative motion between them ) So according to fundamental rule of Rotational Dynamics that all Rotational Parameters Like as α,ωetc.. would remain same about all Point's on Rigid body system.
So In Fact
ω1=ω2=ωICR=ω0=...........(AnyPoint).
Hope This might be Helps You !!
Log in to reply
I tried a non energy method and am getting a completely different answer. Can you please help me out by checking my solution?
Here a{1} : Acceleration of upper cylinder in downward dir. And a{2} : Acceleration of lower cylinder in horizontal dir. N , f : Normal reaction and friction(As in your diagram above) at point of contact. Theta: Angle made by line joining centres with the vertical. f.R=Iαmg−Ncosθ−fsinθ=ma1Nsinθ−fcosθ=ma2Equatingtheaccelerationofpointofcontactonbothcylinders:−a1j^+Rαcosθi^+Rαsinθj^=a2i^−Rαcosθi^−Rαsinθj^∴a2=2RαcosθAnda1=2RαsinθOnsolvinga2=32gsinθcosθ...(1)Xco−ordinateofCentreofBottomcylinder,x=R+2Rsinθ∴dx=2Rcosθθ˙Writinga2asvdv/dxandsubstitutingwithdxin(1)vdv=34Rgsinθcos2θdθIntegrationgivesusv2=98gR(1−cos3θ)Whichgivesmeadifferentresultformaximumvelocity.Isthiswrong?Whyso?Thanksalot.
Yes you are right Deepanshu. But with respect to my diagram w1=-w2. This is because according to your diagram angular velocity(w1) is in anti clockwise direction where as I have choose the angular velocity to be in clockwise direction. But you are right that a1=a1.
I also want to show how I got w1=-w2
as α1=α2
so −dtdω1=dtdω2 (I have added -ve sign because direction of a1 and w1 are opposite to each other)
or −∫dω1=∫dω2
or −ω1=ω2+C
At t=0 ω1=ω2=0 So C=0
So ω1=−ω2
What you guys think?
@DEEPANSHU GUPTA @Mvs Saketh
Yes i got it ,, the fact is that i have represented them as scalars not vectors,, so basically comparing magnitudes,, and i can do that only if i know which is greater,,, i have assumed that rw2 is greater than v2(sin(x)) and so got contradictory results,, got it thanks,,
But this shows that rw2 can never be greater than v2(sin(x)) in the process,,, otherwise we get the contradiction. :)
Log in to reply
I tried a non energy method and am getting a completely different answer. Can you please help me out by checking my solution?
Here a{1} : Acceleration of upper cylinder in downward dir. And a{2} : Acceleration of lower cylinder in horizontal dir. N , f : Normal reaction and friction(As in your diagram above) at point of contact. Theta: Angle made by line joining centres with the vertical. f.R=Iαmg−Ncosθ−fsinθ=ma1Nsinθ−fcosθ=ma2Equatingtheaccelerationofpointofcontactonbothcylinders:−a1j^+Rαcosθi^+Rαsinθj^=a2i^−Rαcosθi^−Rαsinθj^∴a2=2RαcosθAnda1=2RαsinθOnsolvinga2=32gsinθcosθ...(1)Xco−ordinateofCentreofBottomcylinder,x=R+2Rsinθ∴dx=2Rcosθθ˙Writinga2asvdv/dxandsubstitutingwithdxin(1)vdv=34Rgsinθcos2θdθIntegrationgivesusv2=98gR(1−cos3θ)Whichgivesmeadifferentresultformaximumvelocity.Isthiswrong?Whyso?Thanksalot.
will this result hold when radius of two cylinder are different?
@Deepanshu Gupta sir when the radius of two cylinders are different then w1,w2,w(icr) are not same eventhough they form a rigid body
I think it is correct, absolutely,, correct,, except dont reject theta=0 , at that instant the lower cylinder is actually at rest, only that we already know it was at rest at that instant
Log in to reply
why I do not reject θ = 0 ?? I dont think that it is useful since it gives intial condition in that case it is minimum not maximum so it is useless so I reject it..! Sorry But I can't understand what are you trying to say ? Isn't I make any mistake ?
Log in to reply
No its not a mistake its not useful surely,, i meant that you rejected pi/2 because it cant exist,, but rejecting 0 along with that makes it appear as if it cant exist either,, :P not that you are wrong or it is useful
Log in to reply
Okay :)
Log in to reply
Thank you Deepanshu and Saketh for discussing this question. This discussion is really very useful. Once again thank you guys. :)
Note- EDITED due to some errors
Ok so heres the thing, some quick conclusions to draw from observation--
1) The only energy supplier in the system is gravity,
2) That as long as the balls remain in contact , their velocities are constrained, by the relation, v1tanθ=v2 where the angle is between the line joining their radii and the normal vertical( v1 for lower ball, v2 for upper ball)
3) For now i am going to assume that the balls remain in contact till the upper ball reaches the floor, we will soon see how this is not true and they depart before that
4)The upper ball only falls vertically because the lower ball only presses it against the wall which offers an equivalent normal reaction for that to happen,
5) Consequently i can say the lower ball only moves horizontally,
Now applying energy conservation ( with potential energy taken 0 at the height of the com of lower sphere) and substituting constraint relation i can say
mg(2R(1−cosθ))=2mv12+2mv22=2mv12(sec2θ)
now using calculus i can show that maxima occurs at theta= arc cos(2/3) degrees (provided i did the calculations correct)
which is * 16gR/27 *
HOWEVER this is where the TWIST occurs,, because if my equations were correct then according to it the speed of the lower ball becomes 0 at angle 90 degrees,, but how is that possible when there is no force acting oppsite to it,, so its velocity can never decrease, so at its maxima or at angle arc cos (2/3) degrees,, the spheres depart and further motion is independent,,
Thus at that angle the two balls get departed,, now you can easily find subsequent velocity of the upper ball as it is free falling under gravity
Now velocity of upper ball at instant of departure is 20gR/27 now individually applying energy conservation for upper ball find velocity max which occurs just before touching ground,,,
*Am i correct @DEEPANSHU GUPTA *
Log in to reply
You are done Excellent work!! Hats off!!
But I think final answer should be V1,max=2716gRV2,max=45216gR.
And According to you
dθdV12=0θ=0×(initialcondition)orθ=2π(rejected)orθ=cos−132.
I'am agreeing with you that the condition
θ=2π. is rejected because V1=0(∵V2=0).
which is not possible since lower cylinder never get's stop.
But I have doubt that why does this condition is arouse after differentiation ? Is it coincident or some logic behind it ??
Log in to reply
Probably because initially the upper cylinder presses the lower cylinder more on the vertical direction and less on the horizontal direction initially ,, so the rate of change of velocity of lower cylinder gradually increases along with velocity,, but slowly as the relative velocity of seperation of the cylinders increase,,, they touch less and less harder with each other till a point where departure happens and further motion cant be treated as a single rigid body system,, funny thing though,, ( i have updated the calculations)
Also @DEEPANSHU GUPTA it is not a coincidence,,, when the derivative of the velocity of lower cylinder becomes 0 , it means its acceleration(except here rate of change with theta and not time, both implie its independence for all future instants) becomes 0 and when does it become 0,, when no force acting on it anymore and when does that happen, when it loses contact with the upper cylinder,, (note acceleration is rate of change with time and not theta obviously,but if velocity becomes constant,, then its derivative with everything becomes 0, which is what i have shown, ofcourse this should happen just once and we should see it as a maxima,,, however through contradiction i have already shown that the cylinders must depart after this instant)
Log in to reply
Nice solution @Mvs Saketh . The way you gave the mathematical explanation of stuff that why the cylinders loose contact is awesome. Thank you Deepanshu for sharing this problem.
If there would have been friction between the contact contact surface then the cylinders would roll over each other. How should this question be solved?
Log in to reply
Pandey ji (I am calling you by this name because , I have an friend of similar surname as yours and we call him Pandey ji with love)
I think that will be more interesting and difficult...!! I will surly give a try to it. !!
Log in to reply
Most of my friends also call me by this name. :D
Now if we apply conservation of energy we have to consider rotational energies also.
I tried to find relation between ω and v
I came up with this equation
v2cosθi^+(rω2−v2sinθ)j^=v1sinθi^+(rω1+v1cosθ)j^
On equating i cap I got v2=v1tanθ
and on equating j cap I got rω2−v2sinθ=rω1+v1cosθ
or rω2−rω1=cosθv1
Also I think ω2=−ω1.
@DEEPANSHU GUPTA and @Mvs Saketh , what are you guys getting?
yeah...!! Thanks a lot Saketh !!
how do I prepare for IPHO
HOW do I prepare for ipho? please tell