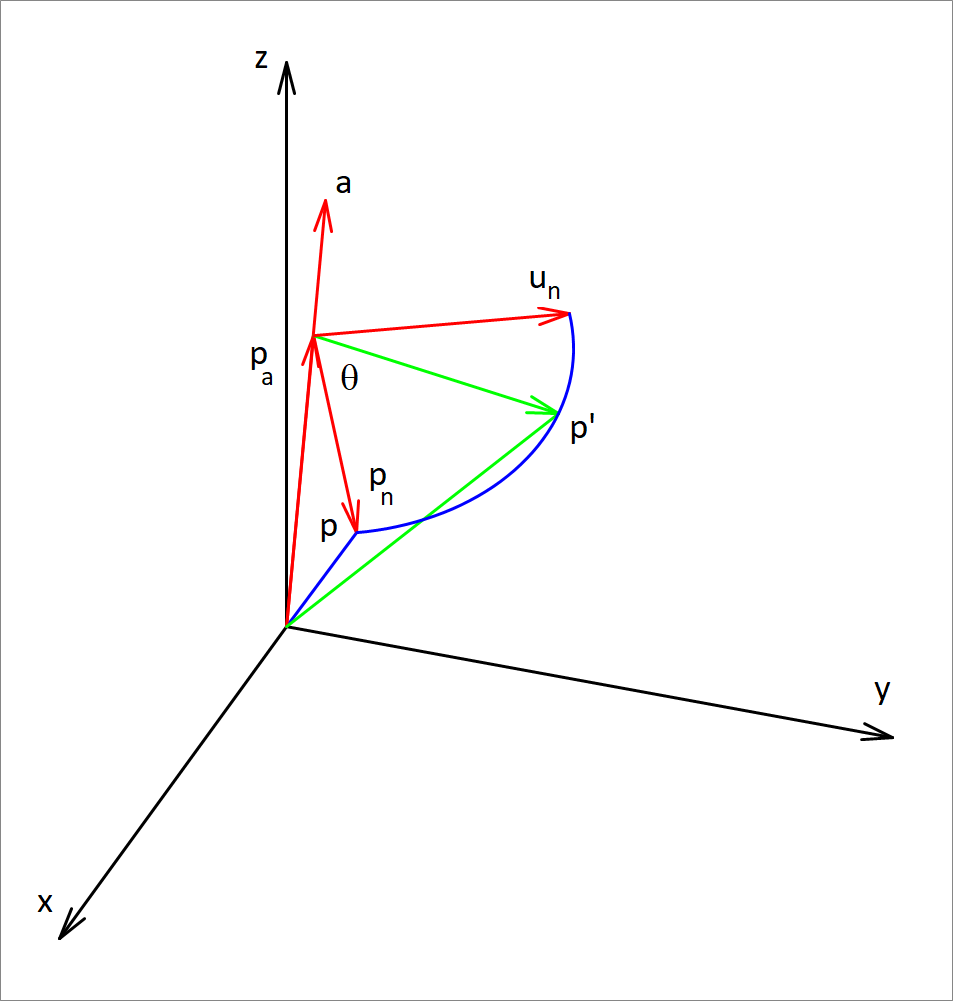
In this note, I investigate the rotation matrix that relates the image of a point p when it is rotated by an angle θ about an axis a that passes through the origin.
Without loss of generality, we assume that the direction vector of the axis is a unit vector.
Now we decompose the vector p, into two components, one along the rotation axis, and one orthogonal to it.
The component along the rotation axis is given by
pa=(p.a)a
(remember that a is a unit vector so, a⋅a=1
And, the orthogonal component is,
pn=p−pa=p−(p⋅a)a
In matrix-vector notation, if all vectors are (3 x 1) column vectors, then
pa=(p⋅a)a=(a⋅p)a=(aTp)a=a(aTp)=(aaT)p
and
pn=p−pa=(I−aaT)p
Now when the component pa undergoes rotation, it is unchanged.
It is pn that gets rotated about the axis a. To write an expression for the image of pn undergoing a rotation by θ , we need the perpendicular vector to both a and pn, and is at 90 degrees counter-clockwise from pn. This vector is
un=a×pn=a×(p−pa)=a×p
because a×pa=0 since the two vectors are collinear.
Noe that ∣∣un∣∣=∣∣a×pn∣∣=∣∣pn∣∣ because a is orthogonal to pn and a is a unit vector.
So now the plane of rotation is spanned by the vectors pn and un, both equal in length , and that length is ∣∣pn∣∣
With that in mind, and since the point describes a circle in the plane of rotation, then
pn′=cos(θ)pn+sin(θ)un
this expresses the rotation of the normal component of p around the axis a.
where Sa is a 3 x 3 skew-symmetric matrix given by
Sa=⎣⎡0az−ay−az0axay−ax0⎦⎤
(that is, the vector cross product a×p , can be expressed as a matrix-vector multiplication)
and hence, finally,
p′=Rp
where
R=aaT+cos(θ)(I−aaT)+sin(θ)Sa
is the desired rotation matrix.
What if the axis of rotation did not pass through the origin, but passed though a point p0=[x0,y0,z0] ?
In this case, we can translate (shift) the origin of the reference frame to the point p0. Since p0 is on the axis of rotation it is unaffected by the rotation, and its image is itself. Then, we apply our result to the vector (p−p0) which joins the axis of rotation at the point p0.
This discussion board is a place to discuss our Daily Challenges and the math and science
related to those challenges. Explanations are more than just a solution — they should
explain the steps and thinking strategies that you used to obtain the solution. Comments
should further the discussion of math and science.
When posting on Brilliant:
Use the emojis to react to an explanation, whether you're congratulating a job well done , or just really confused .
Ask specific questions about the challenge or the steps in somebody's explanation. Well-posed questions can add a lot to the discussion, but posting "I don't understand!" doesn't help anyone.
Try to contribute something new to the discussion, whether it is an extension, generalization or other idea related to the challenge.
Stay on topic — we're all here to learn more about math and science, not to hear about your favorite get-rich-quick scheme or current world events.
Markdown
Appears as
*italics* or _italics_
italics
**bold** or __bold__
bold
- bulleted - list
bulleted
list
1. numbered 2. list
numbered
list
Note: you must add a full line of space before and after lists for them to show up correctly
# I indented these lines
# 4 spaces, and now they show
# up as a code block.
print "hello world"
# I indented these lines
# 4 spaces, and now they show
# up as a code block.
print "hello world"
Math
Appears as
Remember to wrap math in \( ... \) or \[ ... \] to ensure proper formatting.
2 \times 3
2×3
2^{34}
234
a_{i-1}
ai−1
\frac{2}{3}
32
\sqrt{2}
2
\sum_{i=1}^3
∑i=13
\sin \theta
sinθ
\boxed{123}
123
Comments
nice work! you have solved something which is easy to imagine hard to solve but i didn't get the matrix step how did you use the transpose part. i am a novice at linear algebra so please explain in little simpler terms
I am sorry, I cannot make it any simpler. I suggest you wait till you've gained a working experience with Linear Algebra, then revisit this note, but thanks for the complement.
 In this note, I investigate the rotation matrix that relates the image of a point when it is rotated by an angle about an axis that passes through the origin.
In this note, I investigate the rotation matrix that relates the image of a point when it is rotated by an angle about an axis that passes through the origin.
Easy Math Editor
This discussion board is a place to discuss our Daily Challenges and the math and science related to those challenges. Explanations are more than just a solution — they should explain the steps and thinking strategies that you used to obtain the solution. Comments should further the discussion of math and science.
When posting on Brilliant:
*italics*or_italics_**bold**or__bold__paragraph 1
paragraph 2
[example link](https://brilliant.org)> This is a quote# I indented these lines # 4 spaces, and now they show # up as a code block. print "hello world"\(...\)or\[...\]to ensure proper formatting.2 \times 32^{34}a_{i-1}\frac{2}{3}\sqrt{2}\sum_{i=1}^3\sin \theta\boxed{123}Comments
nice work! you have solved something which is easy to imagine hard to solve but i didn't get the matrix step how did you use the transpose part. i am a novice at linear algebra so please explain in little simpler terms
Log in to reply
I am sorry, I cannot make it any simpler. I suggest you wait till you've gained a working experience with Linear Algebra, then revisit this note, but thanks for the complement.