Which Way Does It Roll?
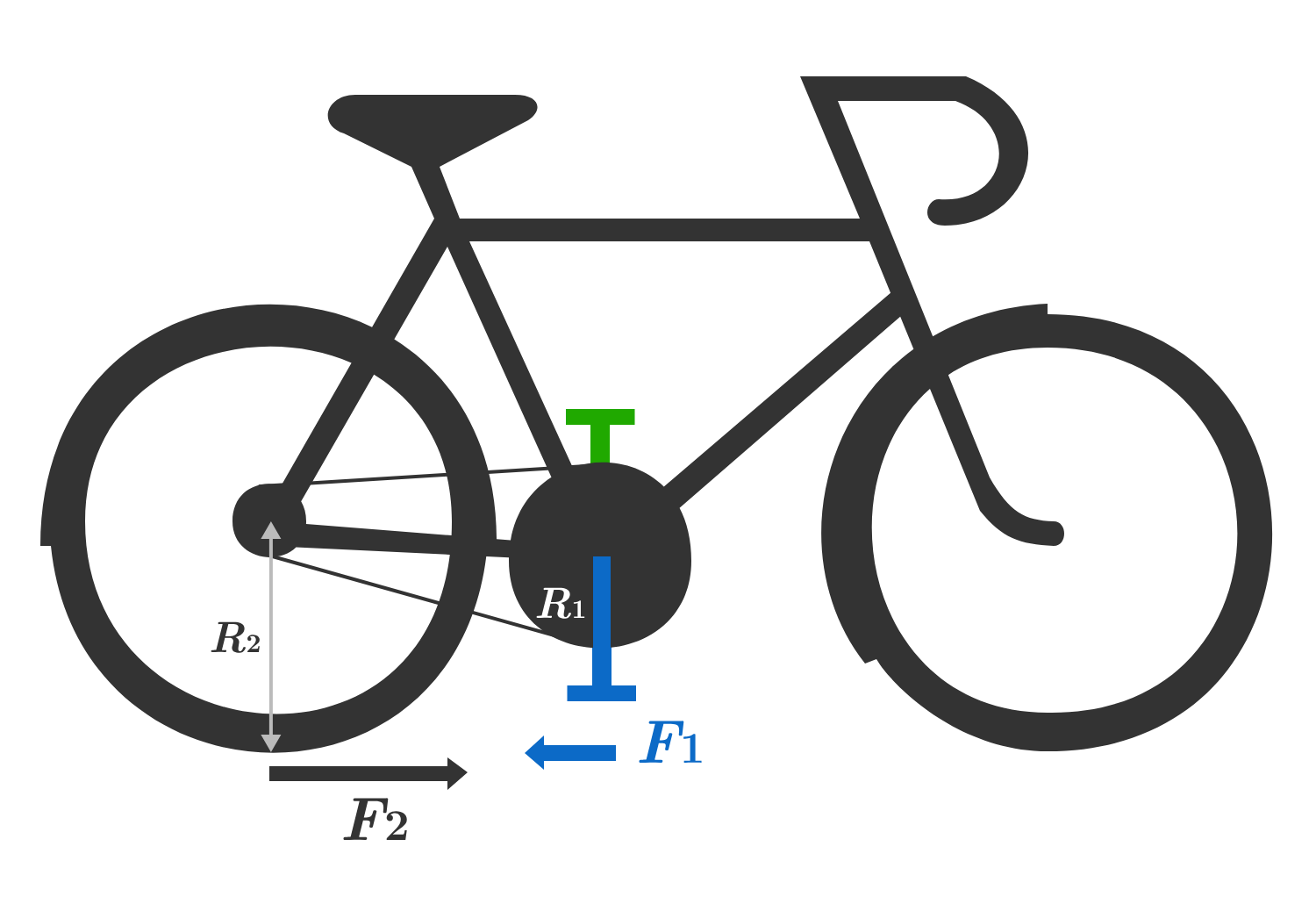
A bicycle rests with its front tire on a frictionless surface and its rear tire on rough pavement, which provides friction F 2 so that the rear tire rolls without slipping.
An external force F 1 = 1 0 0 N is applied to the blue pedal in the rearward direction at a distance of R 1 = 0 . 1 0 m from the center of the sprocket, which has negligible moment of inertia.
Taking rotation to be positive in the counterclockwise direction, what is the instantaneous angular acceleration of the rear wheel, α , in rad / s 2 ? Submit your answer to 1 decimal place.
Assumptions and Details
- The moment of inertia of the rear wheel is I = 0 . 5 0 kg m 2 .
- The wheel has a radius of R 2 = 0 . 3 5 m which is also the height of the center of the sprocket above the ground.
- The mass of the bicycle is M = 1 5 kg .
- Assume there is no other friction in the system.
The answer is 10.6.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
1 solution
The motion of the bicycle after this is all the more interesting. #Veritasium.
Will it make any difference if we apply the force, in the forward direction, on the green paddle, instead?
Log in to reply
Yes. In that case, F 1 will be positive and F 2 will be negative. F 1 will still produce a negative torque with respect to the center of the rear wheel. Therefore the equation for the net torque on the system will change to τ = − F 1 R 1 + F 2 R 2 . This will result in the equation for the angular acceleration changing to α = ( M R 2 2 + I ) − F 1 ( R 1 + R 2 ) . The angular acceleration will then be negative, meaning the bicycle will move forward. I will leave it to you to use the new formula to calculate the new value of α . The wiki Newton's Second Law for Composite Systems may help. It is shown there that one only needs to consider the net external force and the net external torque. However, all torques must be calculated from the same origin.
Log in to reply
Can you elaborate on what you meant by "all torques must be calculated from the same origin?"
Log in to reply
@Rohit Gupta – In the wiki I referenced, it is shown that the net torque on a composite system is produced by external forces only. In the proof all torques are calculated using a single origin. Therefore, to apply the theorem it is necessary to calculate all torques about the same point. That point can be chosen arbitrarily, but some points may be more convenient than others. For that reason I stipulated in the problem that the center of the front sprocket was at the same height as the center of the rear wheel. One can calculate the net external torque using either the center of the rear wheel or the center of the front sprocket and get the same net external torque. All torques produced by internal forces, for example torques produced by tension in the chain, can be ignored. The same wiki proves that the net force on the system (in this case the bicycle) is the sum of external forces and that the acceleration of the center of mass of the system obeys Newton's second law, F n e t , e x t = M a c m , where M is the total mass of the system. Since the bicycle is a rigid body, the acceleration of the center of mass is the same as the acceleration of the center of the wheel. That acceleration is related to the angular acceleration by a = − R 2 α since rolling without slipping is assumed. The minus sign is needed because the angular acceleration is negative (clockwise) when the acceleration is positive (to the right). If you have further questions, please don't hesitate to ask.
Log in to reply
@Dale Gray – If the center of the front sprocket was not at the same height as the center of the rear wheel, then do we need to take the torque about the center of the rear wheel or the center of the front sprocket? And if we use a bigger rear wheel (without impacting the moment of inertia or the total mass of the cycle) then will it attain a greater angular acceleration or lesser?
Log in to reply
@Rohit Gupta – There are only two external forces relevant to the problem, the pull on the pedal and the friction force. If the front sprocket is at a different height than the center of the rear wheel and the center of the wheel is taken as the origin, the torque produced by the applied force about the origin would change. To be specific, let's assume the front sprocket is lowered and the center of the rear wheel is chosen as the origin. The applied force would produce a torque of greater magnitude. The angular acceleration would then be given by the formula
α = ( M R 2 2 + I ) F 1 ( R 1 + d − R 2 ) ,
where d is the distance of the front sprocket below the center of the rear wheel. This would decrease the magnitude of the angular acceleration and also decrease the net force on the system. The net force would decrease because, in F 2 = − F 1 − M R 2 α , − F 1 is positive and α is positive, at least when d is small. At some point, as d increases, the F 2 would exceed the maximum force of static friction and the restriction of rolling without slipping would be violated. The solution would then no longer be valid.
If the center of the front sprocket is lowered, the net torque calculation would change and would no longer allow this solution. The angular acceleration in the problem is around the origin, and with the origin at the center of the wheel, one can use the equation a = − R 2 α which relates acceleration of the center of the wheel, a , and angular acceleration, α , for rolling without slipping. If the origin is placed somewhere else, I don't see how one would impose rolling without slipping.
Log in to reply
@Dale Gray – Thanks, for the detailed solution. I was just wondering that if I have to make a racing bicycle then having a slightly bigger rear wheel will be beneficial or not?
Although, what you have said is a little confusing to me especially because of all the directions and positive and negative signs.
Let me brief what I got from your explanation. From the formula you derived for the angular acceleration, α should increase with an increase in d . Although, this will increase the chances of skidding as well. Thus, it will be beneficial (in a sense of increasing the speed) to slightly lift the level of the center of the wheel but it would also make the ride a little risky.
Am I correct?
Log in to reply
@Rohit Gupta – Actually, the acceleration would decrease from dropping the front sprocket an amount d , as I stated in my previous reply. However, the entire analysis is for a bicycle with no rider and an EXTERNAL force applied to the pedal. If the force on the pedal is supplied by a rider there is only one external force, that of static friction between the rear wheel and the surface it contacts. That force is in the forward direction and produces an forward acceleration. What matters in that case is the power provided by the rider. I have no answer based on the previous analysis, and the formula for angular acceleration previously derived is not applicable to the case of force provided by a rider.
The analysis in this problem is based primarily on equations (8), (19), (22), and (31) in the wiki, Newton's Second Law for Composite Systems , and the condition of rolling without slipping, a = − R α .
Log in to reply
@Dale Gray – Ahh, yes, with the rider, the force F 1 will be an internal force and the whole situation will change. Thanks.
@Rohit Gupta – I forgot to reply to your question about increasing the radius of the wheels. I suggest you take the derivative of α with respect to R 2 and see whether or not α is an increasing function of R 2 ! LOL. Actually, you can just use a larger value of R 2 in the formula and see what value of α you get.
If the force is applied to the green pedal then it will depend if the rear sprocket is a fixed wheel or has a freewheel ratchet! In the former case I'd expect the answer to be 19.25 rad s^-2. In the latter zero.
Log in to reply
Can you elaborate how do you reach to these answers?
Log in to reply
@Rohit Gupta – I was answering the case of F1 being applied to the green pedal in the backward direction. In the forward direction its -19.25.
why did u take F1 and F2 in the same direction while writing F1+F2=MA it should be f1-f2=Ma. right ? @Dale Gray
Log in to reply
I took F 1 to be in the negative direction, which is to the left as in the picture and as stated in my solution. Therefore, the answer for α is positive. Use F 1 = − 1 0 0 Newtons. Since R 1 - R 2 is negative, the numerator in the formula for α is positive. The equation, F 1 + F 2 = M a , is a vector equation. The plus sign does not mean that the quantities to be added are both positive.
I tried to solve it assuming there is a rider on bicycle,hence I only took F2 as the external force
Log in to reply
As you no doubt realize now, the force F 1 is also an external force. Have you reworked it with both forces as external?
why not -10.6
Relevant wiki: Torque - Dynamical Behavior
I assume the strong form of Newton's third law, where the action-reaction pair of forces between particles lies along the line connecting them. With that assumption, the system obeys Newton's second law for the net external force, F , on the system and the acceleration, a , of the center of mass, F = M a . Also, with that assumption, the net external torque, τ , and the angular acceleration, α , satisfy the rotational analogue of Newton's second law, τ = I α , where I is the moment of inertia and the origin for calculating torques is the center of the rear wheel.
Considering forces to the right as positive and forces directed to the left as negative, one has F = F 1 + F 2 . Similarly, with counterclockwise torques positive, τ = F 1 R 1 + F 2 R 2 .
The acceleration of the center of mass and the angular acceleration are related by a = − R 2 α , since rolling without slipping is assumed. Solving F 1 + F 2 = M a = − M R 2 α for F 2 gives, F 2 = − F 1 − M R 2 α . Substituting for F 2 in F 1 R 1 + F 2 R 2 = I α and solving for α gives, α = ( M R 2 2 + I ) F 1 ( R 1 − R 2 ) . Using the values stated in the problem, one has α = 10.6.
If you want to read more, click this article: Newton's Second Law for Composite Systems .