Oscillating disks on a step
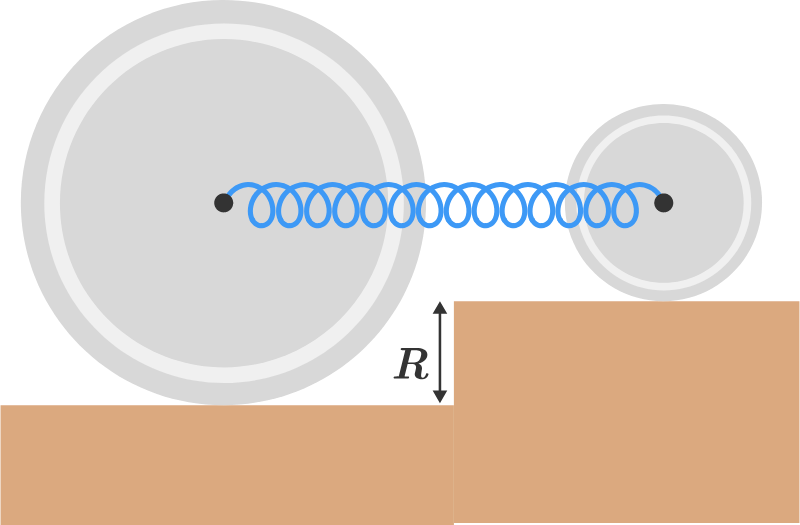
Two uniform circular disks of masses M and 4 M and radii R and 2 R , respectively, are connected by a massless spring of force constant k and placed at different heights so that the spring is parallel to the horizontal, as shown above.
Initially, the spring is compressed, and then the system is released from rest. Assuming friction is large enough to prevent slipping, find the angular frequency of oscillation of the system.
If you answer comes in the form of b M a k , where a and b are coprime positive integers, then enter a + b as the final answer.
The answer is 11.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
@Steven Chase I think the answer should be √8k/15M . See , if I consider the 2 disks as a system,then their momentum is conserved as there is no external force on them( the spring force is an internal force and must be neglected) Now by momentum conservation the velocity of biggger disk becomes V/4 and for smaller disk is V.
Now we right the expression for energy and differentiate it to obtain 15Ma/8k = kx ( x is extension in the spring) Therefore we get w= √8k/15M.
Please check my solution and tell me if I have committed some mistake.
Log in to reply
The reason why momentum conservation may not be assumed here is the static friction force. It does not affect energy conservation (because it does no work, since the wheel is at rest at that point), but it certainly contributes momentum.
The total linear momentum is actually conserved here, but that is not a priori clear. If one wheel had been hollow and the other solid, for instance, the solid wheel would have had the greater linear momentum.
Log in to reply
I understand your explanation sir, but can you please explain clearly the hollow and solid wheel ? Thanks.
Log in to reply
@A Former Brilliant Member – For the linear and angular acceleration we write a = m F s − F f ; α = γ m r 2 F f r , where F s is the spring force, F f is the friction force, and γ is a constant that depends on the mass distribution of the wheel. For the solid wheel we have γ = 2 1 and for a hollow wheel (ring) we have γ = 1 .
The condition for rolling without slipping is a = r α . Thus m F s − F f = γ m F f , F f = γ + 1 γ F s . In the case of two solid wheel this gives F f = 3 1 F s for both wheels. Since the two wheels roll in opposite directions, the friction forces are equal in opposite directions, so that the total external force on the system is zero.
But if wheel #1 is solid and wheel #2 is hollow, we have F f , 1 = 3 1 F s and F f , 2 = 2 1 F s , so that the friction force F f , 2 is greater. In this case the total external force is not zero, so that the total linear momentum is not conserved.
Log in to reply
@Arjen Vreugdenhil – Thanks !!!!!
@Arjen Vreugdenhil – This is a great point. To extend further, can I say, if both the rolling objects are similar only then the center of mass will remain at rest otherwise the center of mass will also oscillate with the same frequency?
What about friction? I would consider friction to be an external force which does not result in energy losses.
Log in to reply
As it is not causing any energy loss, writing it in the energy expression does not affect the final answer as finally we are differentiating the energy expression.
Log in to reply
@A Former Brilliant Member – I added another solution to the end which uses force and torque instead of energy, and it leads to the same conclusion.
Log in to reply
@Steven Chase – Is there anything wrong in my solution?
Log in to reply
@A Former Brilliant Member – I did some numerical simulations, and it appears that my equations do indeed imply constant zero linear momentum. So I agree with your statement that the linear speed of the bigger disk is a quarter of the speed of the smaller one (assuming the system starts from rest). Can you elaborate on your energy expression, the differentiation, and so on?
Log in to reply
@Steven Chase – Please see my solution
Log in to reply
@A Former Brilliant Member – I agree with almost everything you've got. But one adjustment is needed. See below:
Log in to reply
@Steven Chase – Thanks!!!! I almost forgot about the relative velocities. BTW can you suggest me where can I learn about Lagrangian mechanics?
Log in to reply
@A Former Brilliant Member – There's a link in my solution
Log in to reply
@Steven Chase – Thanks!!! But I have one more query , is there no way in which Lagrangian mechanics can be used when friction is present?
Log in to reply
@A Former Brilliant Member – I think there is. But I have not yet ascended to that level of Jedi Masterdom :)
The momentum is not conserved. If the rollers slid frictionlessly then I think your √8k/15M is probably right. However there is a net (oscillating) force applied to the ground due the different mount of torque required by each roller to.
Log in to reply
How much friction force does each of the rollers experience? I think if you work it out, you'll find that they are equal, making the external net force zero and conserving the momentum!
Log in to reply
@Arjen Vreugdenhil – Yes you are right the ratio of the amplitudes is in inverse proportion to the masses. However the angular momentum is not conserved so there will be a net oscillating torque applied to the ground. As you say with different masses and shapes there may also be a net oscillation force applied to the ground.
This is a fantastic solution with Lagrangians. It should be noted though that an alternate solution path could be to just differentiate the energy expression directly. It works particularly nicely here since the spring potential is quadratic so we get the SHM differential equation.
@Steven Chase gave a beautiful solution using Lagrangians. I will post a more elementary one:
We can ignore the gravitational forces on the wheels since they are balanced by normal forces and don't generate torque. This leaves two forces on each wheel: the spring force F s toward the center and a friction force F i outward ( i = 1 , 2 ).
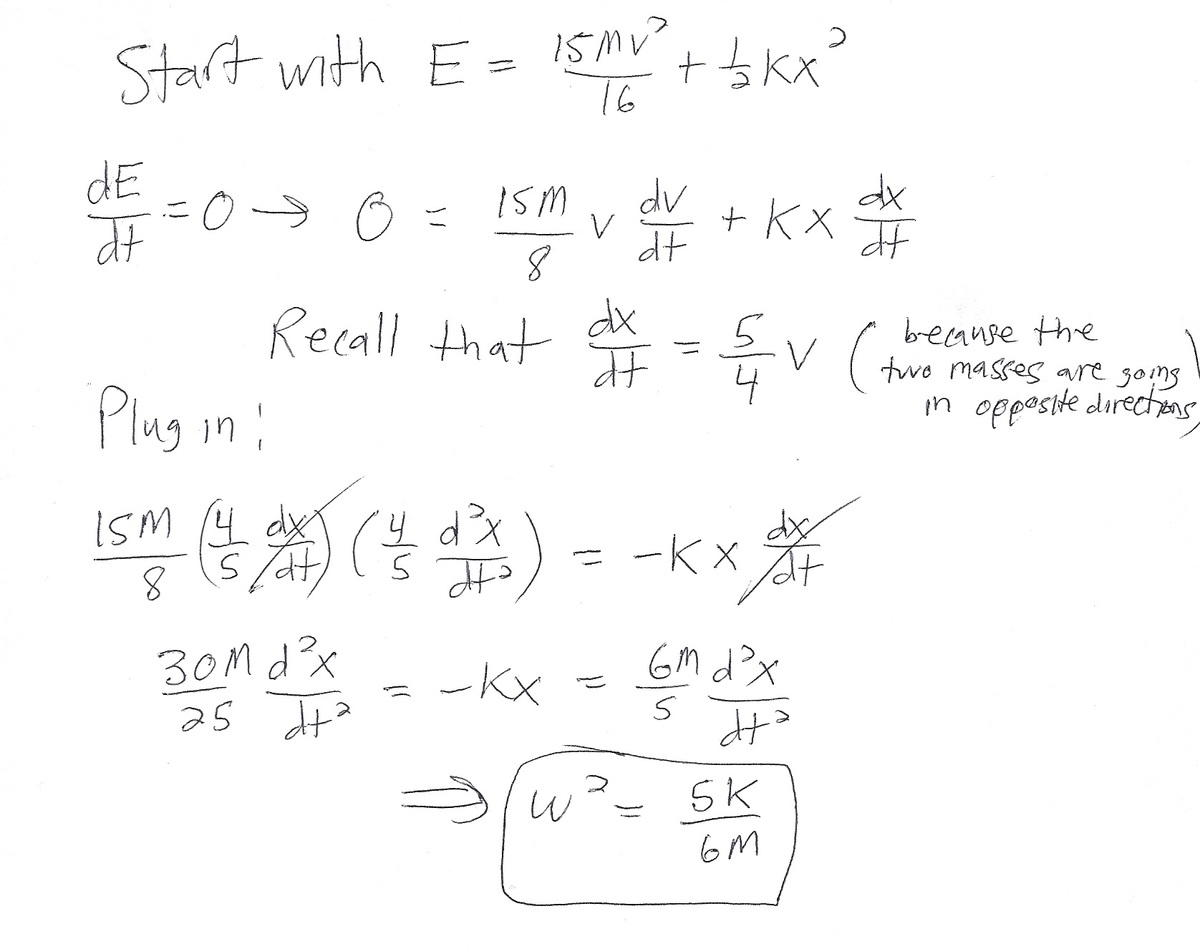
For each wheel we have the translational and rotational equations of motion a i = m i F s − F i α i = 2 1 m i r i 2 F i r i = m i r i 2 F i Rolling without slipping requires a i = r i α i so that m i F s − F i = m i 2 F i ∴ F i = 3 1 F s . In other words, the friction force on each wheel is one third of the spring's force, in the opposite direction. The acceleration of each wheel is a i = m i F s − F i = 3 m i 2 F s . Now the force F s = k x , where x is the distance between the CMs of the wheels, and a 1 + a 2 is the acceleration of this distance (up to a negative sign). Thus − x ¨ = a 1 + a 2 = 1 2 M 2 F s + 3 M 2 F s = 6 M 5 F s = 6 M 5 k x . Comparing this to the standard equation for a harmonic oscillator, x ¨ = − ω 2 x we see immediately that ω 2 = 5 k / 6 M so ω = 6 M 5 k . We therefore submit the answer 5 + 6 = 1 1 .
Why is F s = k x , shouldn't it be F s = k Δ x where Δ x is the elongation/compression in the spring?
Log in to reply
Correct. It does not matter for the argument, for the second time derivative of Δ x = x − x 0 is still equal to − Δ x ¨ = a 1 + a 2 .
Sorry i'm confused - aren't a and b supposed to be co-prime integers? how could 6 be one of the solutions for a or b?
Log in to reply
"Co-prime" is not the same as "prime". To integers a and b are co-prime if they have no common factors. Or, gcd ( a , b ) = 1 . For instance,
-
a = 5 and b = 5 are not co-prime; their gcd is 5.
-
a = 1 2 and b = 3 5 are co-prime; their gcd is 1.
-
a = 2 0 and b = 3 0 are not co-prime; their gcd is 10.
The approaches given are elegant both mathematically and from a physics perspective. Just for curiosity sake, how would we relate to the formula for a simplified system of 2 masses , i.e sqrt (k / (m1 + m2/2)) where instead of the masses, we would now substitute the moments of inertia. I do not see the moments of inertia directly anywhere
Log in to reply
I guess the last solution (Ed Sirret's) pertains to my question. I guess you are also adjusting for the different radii
In my second equation, α i = … , the denominator 2 1 m i r i 2 is the moment of inertia.
When solving problems of this type, I prefer to work with either the radius of gyration κ , and I = m κ 2 ; or with a mass distribution constant γ , and I = γ m r 2 . If we do that here, we find that ω = k ( ( γ 1 + 1 ) m 1 1 + ( γ 2 + 1 ) m 2 1 ) .
Force (F) in the spring (x is the length relative to the rest length), +ve is further apart.
F
=
−
k
x
The torque on the large roller is balanced by the rotation inertia about the point of contact with the ground . Let a be the angle of rotation in the large roller (anti clock) and b in the smaller (clock wise) a ¨ = I a 2 R F and b ¨ = I b R F
The moment of a roller about it centre axis is 2 m r 2 but about the point of contact with the ground (using the parallel axis theorem) is 2 3 m r 2
Therefore I a = 2 3 ⋅ 4 M ⋅ ( 2 R ) 2 = 2 4 M R 2 and I b = 2 3 M R 2
Now the seperation of the rollers x ¨ = 2 R a ¨ + R b ¨ = F R 2 ( 2 4 M R 2 2 ⋅ 2 + 3 M R 2 2 ) = 6 M 5 F
So x ¨ = − 6 M 5 k x
This is solved for with a function of the form K 1 sin ( ω t + K 2 )
where the angular velocity is 6 M 5 k
Thus 5+6 = 1 1 .
Ah yes, using the instantaneous axis of rotation simplifies the calculations. There is no torque due to frictional force about this axis. Also, this method also transforms the translation + rotation problem to a purely rotational problem.
We can use the concept of Reduced mass and replace these discs with one disc of mass - 4M/5 and radius = 2R/√5 ( keeping mass density constant ) . (1) f - kx = m'a (2) f.r = mr.r.α/2 . On solving we get ω = √2k/3m' . Substitute the value of m'
I've been looking for opportunities to use Lagrangian Mechanics , and this is a good one. Call the position of the larger disk x 1 and the position of the smaller disk x 2 . The masses are similarly M 1 and M 2 . Note that the disks are rolling without slipping, which has two implications:
1) No energy losses - hence LM is applicable in a straightforward way
2) There is a definite relationship between rotation and translation
Accounting for both rotation and translation (left as an exercise for the reader), the kinetic energy is:
K E = 4 3 M 1 ( x 1 ˙ ) 2 + 4 3 M 2 ( x 2 ˙ ) 2
The spring potential energy is ( L 0 is the un-stretched spring length): U = 2 1 k ( x 2 − x 1 − L 0 ) 2
The system Lagrangian is:
L = K E − U = 4 3 M 1 ( x 1 ˙ ) 2 + 4 3 M 2 ( x 2 ˙ ) 2 − 2 1 k ( x 2 − x 1 − L 0 ) 2
The Euler-Lagrange equations are:
d t d ∂ x 1 ˙ ∂ L = ∂ x 1 ∂ L d t d ∂ x 2 ˙ ∂ L = ∂ x 2 ∂ L
Evaluating these yields:
2 3 M 1 x 1 ¨ = k ( x 2 − x 1 − L 0 ) 2 3 M 2 x 2 ¨ = − k ( x 2 − x 1 − L 0 )
Plugging in specified parameters for the masses gives:
6 M x 1 ¨ = k ( x 2 − x 1 − L 0 ) 2 3 M x 2 ¨ = − k ( x 2 − x 1 − L 0 )
Multiplying the second equation by 4 gives:
6 M x 1 ¨ = k ( x 2 − x 1 − L 0 ) 6 M x 2 ¨ = − 4 k ( x 2 − x 1 − L 0 )
After some consolidation:
6 M ( x 2 − x 1 ) ¨ = − 5 k ( x 2 − x 1 ) + α ( x 2 − x 1 ) ¨ = 6 M − 5 k ( x 2 − x 1 ) + β
Thus the spring length, x 2 − x 1 , oscillates sinusoidally with the following angular frequency:
ω = 6 M 5 k
Below is an alternative strategy, which uses forces and torques instead of the Lagrange approach.
Write Newton's 2nd Law for the horizontal movement of the larger disk:
F x 1 = M 1 x 1 ¨ k ( x 2 − x 1 − L 0 ) − F f r i c t i o n = M 1 x 1 ¨
Now look at the rotational analog of Newton's 2nd law for the same body:
τ = I 1 θ 1 ¨ F f r i c t i o n R 1 = 2 1 M 1 R 1 2 R 1 x 1 ¨ F f r i c t i o n = 2 1 M 1 x 1 ¨
Plugging this into the previous equation gives:
F x 1 = M 1 x 1 ¨ k ( x 2 − x 1 − L 0 ) − 2 1 M 1 x 1 ¨ = M 1 x 1 ¨ k ( x 2 − x 1 − L 0 ) = 2 3 M 1 x 1 ¨
We could proceed similarly for M 2 and ultimately arrive at the same result as we got for the Lagrange approach.