A problem in relativity
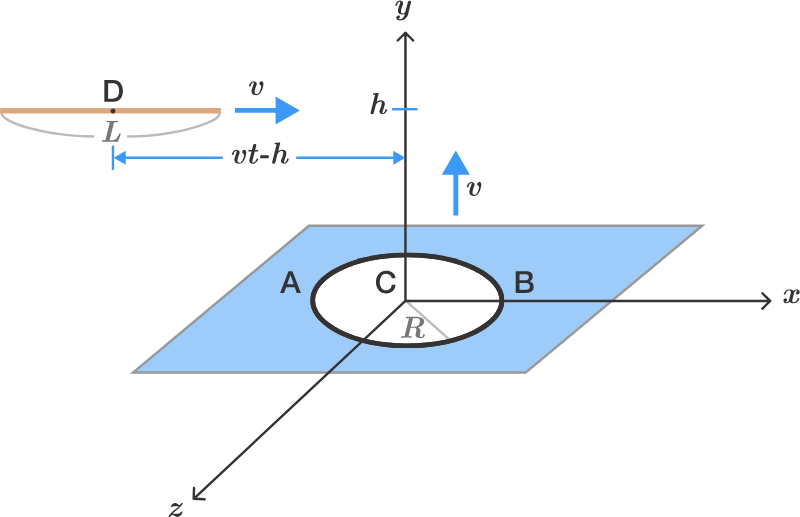
A thin rod of rest length L = 3 R is parallel to the x -axis of an inertial system, S , and moves with constant speed, v = 2 3 c , in the positive x direction, remaining parallel to the x -axis, as shown in the figure. The center, D , of the rod is initially located at ( x , y , z ) = ( − h , h , 0 ) . The plane in the figure has a circular hole of radius R centered on the y -axis, is parallel to the x z -plane, and moves in the positive y direction at constant speed, v , remaining parallel to the x z -plane.
To an inertial observer moving along with the rod in an inertial system we can call S ′ , the point B reaches the x z -plane of S before point A , due to the relativity of simultaneity. Therefore, the plane is tilted for this observer, and the rod will pass through the hole without a collision. The plane and hole are rotated at an angle θ in the S ′ -observer's z ′ direction, i.e., the line connecting A and B makes an angle θ with the x ′ -axis.
Find the angle θ to the nearest tenth of a degree.
The answer is 56.3.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
An interesting aspect of this problem is that the two different observers in S and S ′ have different explanations for there being no collision between the plane and rod. In S the rod is length contracted so that its length is less than the diameter of the hole. In S ′ the plane containing the hole is tilted so that the longer rod can pass through.
The world-lines of the points A and B have coordinates ( c t , − R , v t , 0 ) ( c t , R , v t , 0 ) respectively. In the frame S ′ these can be written ( γ ( c t + c v R ) , γ ( − R − v t ) , v t , 0 ) ( γ ( c t − c v R ) , γ ( R − v t ) , v t , 0 ) respectively. Changing the time coordinates of both of these so that A and B can be considered simultaneously in S ′ , we have worldlines ( c τ , − v τ − γ − 1 R , γ v τ − c 2 v 2 R , 0 ) ( c τ , − v τ + γ − 1 R , γ v τ + c 2 v 2 R , 0 ) Thus the displacement vector A B has coordinates (in S ′ ) ⎝ ⎛ 2 γ − 1 R 2 c 2 v 2 R 0 ⎠ ⎞ Thus the angle θ satisfies tan θ = c 2 v 2 γ For this problem, we have tan θ = 2 3 , and so θ = 5 6 . 3 ∘ .
Although this is not necessary to solve the problem, it is worth noting how we can show that the rod does indeed slip through the hole successfully. In S ′ , we have A B = ⎝ ⎛ R 2 3 R 0 ⎠ ⎞ while the common velocity of A and B is ⎝ ⎛ − v 2 1 v 0 ⎠ ⎞ Thus the gap between A and B is available (for the rod to pass through) for a time of 2 1 v 2 3 R = v 3 R , which is precisely the time that a rod of length 3 R will take to travel through the gap.
Nice solution. However, it appears that you have an extraneous minus sign in the x ′ coordinate for point A in the second line of equations. That typo doesn't affect you result because you dropped it in your subsequent calculation. Also, it appears that you are using the letter τ for the time coordinate in S ′ , which confused me at first, having always seen τ used for proper time. A more standard notation for the time in S ′ would be t ′ .
Log in to reply
Isn't it actually possible for a rod of length 4 R to get through this hole? From the point of view of S , the rod has length 4 R γ − 1 = 2 R , so fits in the hole. From the point of view of S ′ , the tilting of the hole means that the rod has a time v 3 R to get through the hole. Since the passage of the hole starts when B meets the leading end of the rod, so the point A has already passed the leading R of the rod (the hole is only R wide in S ′ ), this time v 3 R is the time it takes for A to get past the remaining 3 R of the rod.
Log in to reply
Please check your calculation of the width of the hole in S ′ by determining the length of your displacement vector. I do not find it to be R . While it is true that a circle at rest is S would be an ellipse of minor axis R as determined in S ′ , remember that the plate with the hole has a component of velocity in the y direction. Also, B is actually to the right of the left end of the rod by R/2 when B reaches y ′ = h. When A reaches y ′ = h, the left end of the rod is to the right of A by R/2. This means that the rod of length 3R has R/2 clearance at each end when the hole passes by. Therefore a rod of rest length 4R would just miss colliding with, first B, then A.
Log in to reply
@Dale Gray – My point, which you agree with, is that a rod of length 4 R would fit through. The question states that the rod has length 3 R .
Your calculations here are for the details of a rod of length 3 R . My ones in the comment above (not my solution) are for a rod of length 4 R .
Log in to reply
@Mark Hennings – Yes, I know. However, did you notice my remark about your parenthetic statement? The hole does not have a width of R in S ′ . In your solution you gave the displacement vector from A to B. If you use that to calculate the distance from A to B you will not get R. You will get approximately 1.8R.
Log in to reply
@Dale Gray – Obviously. Let us agree that the x - component of the width of the hole is R , which is the quantity I was using in my argument.
Log in to reply
@Mark Hennings – Yes, I agree with that statement. I have enjoyed discussing this problem with you and think we are in agreement on everything now.
Typo corrected. As the time-coordinate of the frame S ′ , τ is the proper time of the rod.
Log in to reply
Sorry, when I first looked at your solution, I thought you were using the proper time along the world lines of A and B and couldn't figure out how.
Solution: Consider an inertial reference frame S ′ with axes x ′ , y ′ , and z ′ coinsiding with x , y , and z at time t = t ′ = 0 , and moving with constant speed, v , in the positive x direction relative to S . The velocity vector of the point labeled A on the plane, relative to S , has components ( u x , u y , u z ) = ( 0 , v , 0 ) . The velocity vector for point B is also ( u x , u y , u z ) = ( 0 , v , 0 ) . Using the velocity transformation
u x ′ u y ′ u z ′ = ( 1 − c 2 u x v ) u x − v = γ ( 1 − c 2 u x v ) u y = γ ( 1 − c 2 u x v ) u z ,
where γ = 1 − c 2 v 2 1 , to find the velocity vectors for A and B relative to S ′ gives ( u x ′ , u y ′ , u z ′ ) = ( − v , γ v , 0 ) for both A and B . The equations of motion of points A and B relative to S ′ are x A ′ y A ′ z A ′ = = = u x ′ t ′ + x A 0 ′ = − v t ′ + x A 0 ′ u y ′ t ′ + y A 0 ′ = γ v t ′ + y A 0 ′ u z ′ t ′ + z A 0 ′ = z A 0 ′ , where ( x A 0 ′ , y A 0 ′ , z A 0 ′ ) are the coordinates of A , relative to S ′ at time t ′ = 0 . Similarly, for point B x B ′ y B ′ z B ′ = = = u x ′ t ′ + x B 0 ′ = − v t ′ + x B 0 ′ u y ′ t ′ + y B 0 ′ = γ v t ′ + y B 0 ′ u z ′ t ′ + z B 0 ′ = z B 0 ′ . The Lorentz transformation, given in the figure, allows determination of the initial values, x A 0 ′ , etc. The coordinates of A relative to S at time t = 0 are ( x A , y A , z A ) = ( − R , 0 , 0 ) and those of B are ( x B , y B , z B ) = ( R , 0 , 0 ) . The Lorentz transformation gives ( x A ′ , y A ′ , z A ′ ) = ( − R γ , 0 , 0 ) at time t ′ = c 2 v γ R . and ( x B ′ , y B ′ , z B ′ ) = ( R γ , 0 , 0 ) at time t ′ = − c 2 v γ R . Substitution gives − R γ 0 0 = = = − c 2 v 2 γ R + x A 0 ′ c 2 v 2 R + y A 0 ′ z A 0 ′ . and R γ 0 0 = = = c 2 v 2 γ R + x B 0 ′ − c 2 v 2 R + y B 0 ′ z B 0 ′ . Solving for the initial positions of points A and B relative to S ′ gives x A 0 ′ y A 0 ′ z A 0 ′ = = = − R γ ( 1 − c 2 v 2 ) = − γ R − c 2 v 2 R 0 . and x B 0 ′ y B 0 ′ z B 0 ′ = = = γ R c 2 v 2 R 0 . At any time t ′ in S ′ , x A ′ y A ′ z A ′ = = = − v t ′ − γ R γ v t ′ − c 2 v 2 R 0 and x B ′ y B ′ z B ′ = = = − v t ′ + γ R γ v t ′ + c 2 v 2 R 0 . Therefore, at any time t ′ in S ′ , the line segment connecting points A and B has slope m ′ = Δ x ′ Δ y ′ = x B ′ − x A ′ y B ′ − y A ′ = c 2 v 2 γ . If v = ( 3 / 2 ) c , as stated in the problem, then γ = 2 and m ′ = 3 / 2 . If θ is the angle between the x ′ direction and the line in S ′ connecting A and B in S ′ , then tan θ = m ′ = 2 3 . Therefore, θ = tan − 1 ( 3 / 2 ) = 5 6 . 3 ∘ .