Crackling Mechanics from Springer.
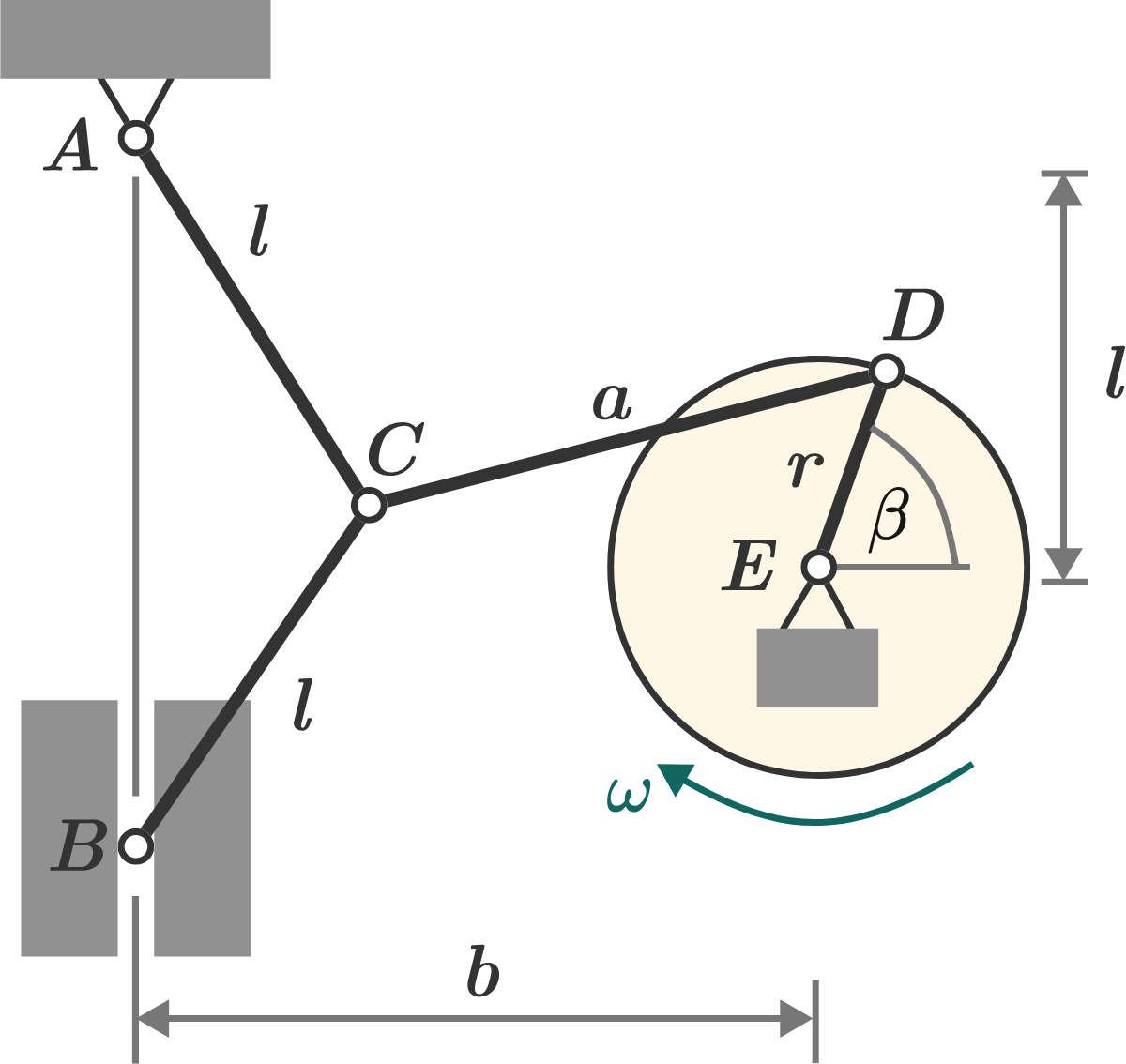
A toggle lever is driven with angular velocity ω , as shown.
Determine the sum of the magnitudes of velocities of points B , C , and D in m/s .
Assume l = 3 0 cm , a = 4 0 cm , r = 1 5 cm , b = 5 0 cm , β = 7 0 ∘ , and ω = 4 rad / s .
The answer is 1.7.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
@Calvin Lin , sir here also please tell me how to modify these physics digram?
Log in to reply
What do you mean by "modify these physics diagrams"?
We have an illustrator who helps to create such images, especially for problems that we want to feature. We use figma.com for our illustrations.
Log in to reply
@Calvin Lin , sir I meant that someone had changed the colour of my diagram which I initially posted.
Thanks for giving the illustrator.
@Calvin Lin , can you help me to create one image (same as the one in this question) through Figma?
How to use it for drawing physics diagrams?
Call the angle between A C and the vertical θ . Define the coordinates of A as the origin. Some initial coordinate definitions (note that we define the C coordinates in terms of θ because A C rotates about A ) :
A x = 0 A y = 0 E x = b E y = − l D x = E x + r c o s β D y = E y + r s i n β C x = l s i n θ C y = − l c o s θ B x = 0 B y = B y
Apply condition for length of CD:
( E x + r c o s β − l s i n θ ) 2 + ( E y + r s i n β + l c o s θ ) 2 = a 2
The only unknown in the above equation is θ , so we solve this equation for θ . θ = 3 2 . 7 5 6 4 ∘
Apply length invariance principle to CD:
d t d ( E x + r c o s β − l s i n θ ) 2 + d t d ( E y + r s i n β + l c o s θ ) 2 = d t d a 2 ( E x + r c o s β − l s i n θ ) ( − r s i n β ω − l c o s θ θ ˙ ) + ( E y + r s i n β + l c o s θ ) ( r c o s β ω − l s i n θ θ ˙ ) = 0
Now that θ is known, the only unknown in the above equation is θ ˙ , so we solve this equation for θ ˙ . θ ˙ = 1 . 7 6 7 2 rad/s . Note that since the rotation is clockwise, I used − 4 for ω .
Apply condition for length of BC:
( l s i n θ − 0 ) 2 + ( − l c o s θ − B y ) 2 = l 2
Solve for B y . B y = − 0 . 5 0 4 5 9 m
Apply length invariance principle to BC:
d t d ( l s i n θ − 0 ) 2 + d t d ( − l c o s θ − B y ) 2 = d t d l 2 ( l s i n θ ) ( l c o s θ θ ˙ ) + ( − l c o s θ − B y ) ( l s i n θ θ ˙ − B y ˙ ) = 0
The only unknown in the above equation is B y ˙ , so we solve this equation for B y ˙ . B y ˙ = 0 . 5 7 3 7 m/s
Final sum of speeds:
v B + v C + v D = ∣ B y ˙ ∣ + ∣ l θ ˙ ∣ + ∣ r ω ∣ ≈ 1 . 7 0 4 m/s
@Steven Chase , awesome solution.
I used concept of instantaneous centre of rotation with help of velocity diagram.
Please see and try this one also by me.
“Mechanical Rod with archery and bow”.
Log in to reply
That sounds interesting. Could you post your solution? I figured there was probably a method that required less calculation, in exchange for using higher-order concepts.
Log in to reply
@Steven Chase , sure sir. I will post it by tomorrow evening.
In fact, i used similar concept for the problem "Crackling Mechanics from Springer". I will post solution to that problem also.
Log in to reply
@Priyanshu Mishra – It is this problem "Crackling Mechanics" that I'm interested in seeing the solution for
Though it was tough to draw the arrows in the diagram due to lack of physics editor, i managed somehow and took the photo. Hope it is fine.
The centers of rotation Π 1 ( bar C D ) and Π 2 (bar B C ) are given by the intersections of the perpendiculars to
v D = r ω ( v D ⊥ E D ) and v C ( v C ⊥ A C ) and to v C and v B , respectively. This leads in the layout diagram to the depicted representation.
With the chosen scale, we read from the figure
v C ≅ 0 . 9 v D , v B ≅ 1 . 0 v D
and obtain with
v D = r ω = 0 . 6 m / s
the velocities
v C ≅ 0 . 5 m / s , v B ≅ 0 . 6 m / s .
So, v A + v B + v C = 1 . 7 m / s