Exponential Wire Dynamics - A Strange Anomaly
Consider a particle of mass m = 1 that can slide freely along the curve y = e − x . The curve along which the particle slides is rough with a friction coefficient of μ = 0 . 3 . The goal of this problem is to compute the equation of motion of the system. The answer is of the form:
x ¨ = b ( e − a x + 1 ) ( e − x x ˙ a + b ) ( b e − x − c )
Here a , b and c are positive integers, and b and c are coprime. Compute a + b + c .
Note:
-
An ambient constant gravitational field along the negative Y direction exists throughout space. Acceleration due to gravity is g = 1 0 .
-
e ≈ 2 . 7 1 8 is the Euler's number.
-
Here, x ˙ and x ¨ are the first and second derivatives of the x-coordinate of the particle with respect to time.
Bonus:
Numerically solve the equation of motion and plot the variation of the particle's coordinates with time and also plot its trajectory. Consider the case where the particle is released from rest from the point ( 0 , 1 ) , at time t = 0 . Is something really weird going on? If yes, why? Perform the same simulation for μ = 0 and see if you obtain meaningful results.
The answer is 15.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
The anomaly appear because of the following fact. There are two types of friction present in this case, the static friction with coefficient μ s , and the sliding friction with coefficient μ t < μ s . When the particle stops moving on the surface, the static friction starts acting on it. If the component of weight force of the particle along the surface exceeds the limiting value of static friction, the particle will again start to move, not in the opposite direction, but in the same direction as it was moving initially. But this is not possible , since it has already stopped. So there is no question of oscillatory motion.
Hey, about my earlier problem "Another hard simulation problem", I seem to have made an error in my dynamics. I will delete the problem. Your solution is quite excellent.
I think I'll reupload it when it is corrected soon.
Hi, update; my problem has been re-uploaded now. Sorry for the error. It seems I had entered one of my forces wrongly while running the simulation. Thanks for alerting me to this. You can re-solve the problem now.
@Karan Chatrath I didn't get the final expression because I forgot to account for the normal acceleration contribution to x ¨ at the very end (the piece of work after the boxed result). But using the derived expression and running a numerical simulation results in oscillatory motion, which is obviously ridiculous. So we should interpret the expression as being valid until the particle stops moving, but not valid after that. This is similar to a sliding block with friction. You can model the friction force as a potential (identical to horizontal gravity) and use Lagrangian mechanics to analyze it, but the resulting acceleration expression is only valid until the block stops moving.
Log in to reply
Greetings! Thanks for the comment. Now that I think more about your comment, my thoughts point to the idea that the classical laws of motion do not consider the notion of reversibility. These laws do help us to quantify the kinematics of a system as they evolve with time, however.
I draw an analogy with the laws of thermodynamics. The 0'th law speaks of thermal equilibrium, the first law is the law of conservation of energy. However, the first law only quantifies the energy exchanges assuming that a process occurs. It does not lay conditions on whether it can actually happen in reality. That is addressed by the second law which says that every process must result in an increase in the universe's entropy. This establishes that all naturally occurring processes are not reversible.
Similarly, if we consider Newton's laws, the first law speaks of a mechanical system's equilibrium until acted upon by an external force. The second law helps us to quantify the motion of mechanical systems. However, there is no mechanical analogue for the second law of thermodynamics which establishes what processes can occur naturally (quantification of entropy changes for mechanical systems). Or maybe there is, and I don't know how to quantify it. I am trying to draw deeper connections with other principles.
Coming back again to the mechanical system in consideration. When the particle comes to rest after dissipating its kinetic energy to friction, numerically speaking, it is still acted upon by the normal reaction force. This implies that it is also acted upon by friction. So in some weird way, the force which was dissipative in nature is the one which drives the system back into motion after it comes to rest. I have not observed this in simulations yet, but I intend to do so. I will post a detailed solution later.
Would like to know your thoughts on this. Also, I have looked at your note, and I intend to take a deep dive into it. I will share my thoughts soon. But since it is late at my end, I am calling it a day.
Log in to reply
Yes, energy "given" to a gravitational field can be retrieved once more as kinetic energy. But when translational (ordered) kinetic energy is lost as heat, there is no mechanism by which the now disordered heat kinetic energy can be converted back into translational kinetic energy. As you say, this sounds like it ought to have something to do with entropy increase. Perhaps going from translational kinetic energy to heat kinetic energy increases entropy, whereas the reverse decreases it, and is thus disfavored (never happens). Although one could imagine using a thermo-electric generator to power an electric motor, thus accomplishing this transformation (albeit with poor efficiency).
When the block comes to rest, it is now the static coefficient of friction that comes into play. And the static friction force is only as large as it needs to be to prevent the object from beginning to move again. And the direction is also such that motion is prevented. So there is no reason to think that this static friction will restart the motion in the opposite direction.
Log in to reply
@Steven Chase – So I gather that the friction model used is incomplete as it does not account for static friction. I think this consideration can be incorporated in the numerical solution. Thanks for the tip.
@Steven Chase is it possible do define potential for friction altough friction being non conservative force
Log in to reply
To some extent, it is. Consider the problem of a block sliding with friction. Up until the block stops, the friction behaves exactly like horizontal gravity. So it works just fine to represent it as a potential and use Lagrangian mechanics. But the solution is only valid until the block stops.
Where goes the square in the denominator of the second term of the expression in the last but fourth line?
Velocity of particle in x direction is vcos(theta) cos(theta) cancels with square
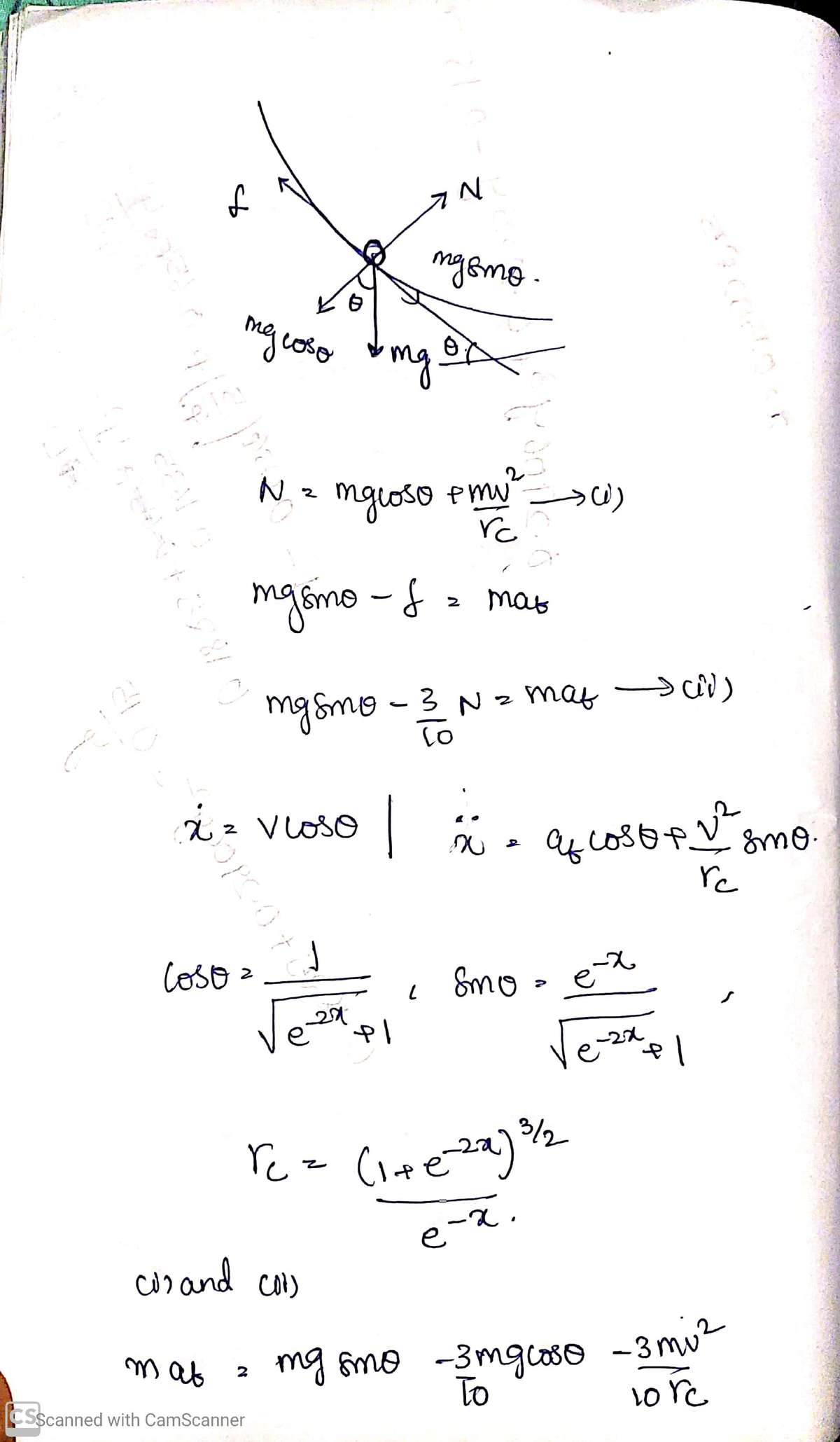
We start out by examining general expression for acceleration of a particle: d t d v = d t d ( v T ^ ) = v ˙ T ^ + v 2 d s d T ^ = v ˙ T ^ + v 2 κ N ^ . In our case, denoting s to be the distance traveled along the wire, we have: d t d v = s ¨ T ^ + s ˙ 2 κ N ^ . Now, by Newton's second law there must be forces which generate both tangential and normal acceleration and hence we obtain two equations: m s ¨ m s ˙ 2 κ = m g sin α − f = N − m g cos α Here α is the angle which tangent subtends with a horizontal line and κ is curvature of the wire. Since we have f = μ N , we are left with: s ¨ = g sin α − μ s ˙ 2 κ − μ g cos α . We are now ready to switch to x perspective: d t d ( s ′ x ˙ ) = s ′ x ¨ + x ˙ 2 s ′ ′ s ′ 2 x ¨ + x ˙ 2 s ′ ′ s ′ s ′ 2 x ¨ ( 1 + e − 2 x ) x ¨ x ¨ = g ∣ ∣ ∣ ∣ s ′ y ′ ∣ ∣ ∣ ∣ − μ x ˙ 2 s ′ 2 s ′ 3 y ′ ′ − μ g ∣ ∣ ∣ ∣ s ′ 1 ∣ ∣ ∣ ∣ = g ∣ y ′ ∣ − μ x ˙ 2 y ′ ′ − μ g = g ∣ y ′ ∣ − 2 x ˙ 2 ( s ′ 2 ) ′ − μ x ˙ 2 y ′ ′ − μ g = g e − x + x ˙ 2 e − 2 x − μ x ˙ 2 e − x − μ g = g ( 1 + e − 2 x ) ( x ˙ 2 e − x + g ) ( g e − x − μ g ) . We read a = 2 , b = 1 0 , c = 3 making the result 1 5 .
Although you could find a potential for friction force if you treat x and x ˙ as independent variables, I don't think there is a way to add it to Lagrangian so that you retain the way of deriving of equations of motion. This is because the friction force depends on x ˙ 2 and when you apply d t d ∂ x ˙ ∂ you will obtain a term involving x ¨ which contradicts physics. Consequently, in the case of inclined plane, the reason why you can import friction term to the Lagrangian is because the object travels in a straight line so there's no normal acceleration to be provided by normal force.
Consider the diagram shared by @DARK ANGEL in his solution. One can see that:
tan θ = − d x d y = e − x
Now, the way I approach these problems is slightly different. I do not exploit the notion of an instantaneous radius of curvature. Instead, I apply Newton's laws along the cartesian directions as such. At any instant of time t let the normal force be N and the friction force be f . Applying Newton's second law along the X and Y directions gives:
m x ¨ = N sin θ − f cos θ m y ¨ = N cos θ + f sin θ − m g f = μ N
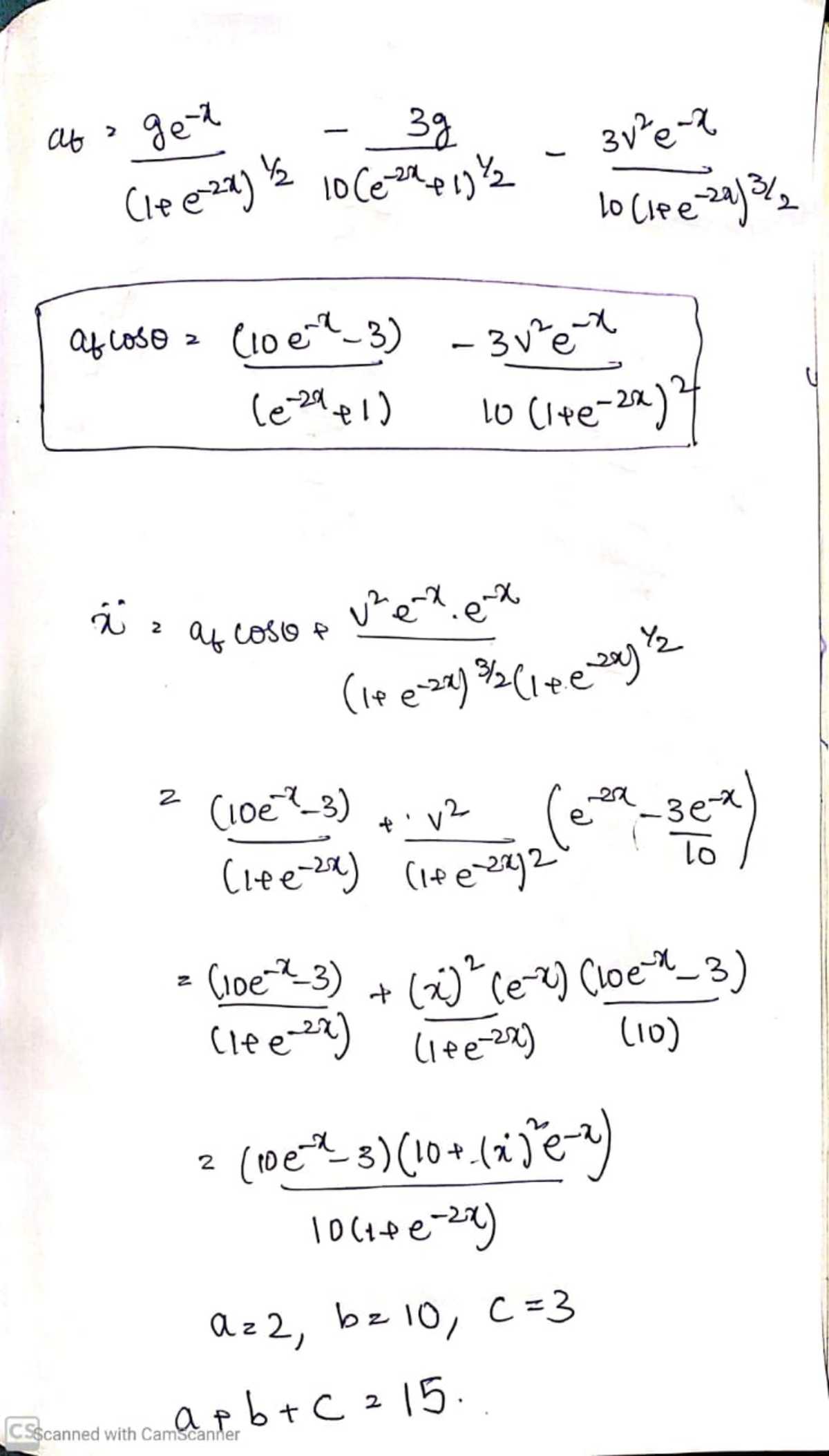
The constraint equation is:
y = e − x
Double differentiating the above gives:
y ¨ = − e − x x ¨ + e − x x ˙ 2
Solving for x ¨ , y ¨ and N using all the above equation leads to the answer:
x ¨ = 1 0 ( e − 2 x + 1 ) ( e − x x ˙ 2 + 1 0 ) ( 1 0 e − x − 3 )
Simplifications have been left out. Having found this equation of motion, the next step is to solve it. The first set of results is when μ = 0 , as follows:
One can see that the result without friction aligns perfectly with expectations. The final speed of the particle can be verified using the energy conservation principle. The first set of results is when μ = 0 . 3 , as follows:
Here, things get strange. The particle appears to be oscillating. @Steven Chase provided me with the insight that the motion must only be considered until the particle comes to rest for the first time when t > 0 .