A rough slide
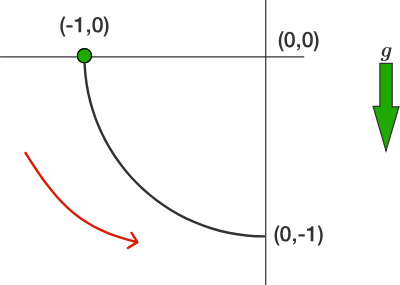
A 1 k g bead slides from rest under the pull of gravity from the point ( − 1 m , 0 m ) to the point ( 0 m , − 1 m ) along a wire in the shape of a circle centered on the origin, as shown above.
The wire is rough, and exerts a retarding tangential friction force F f = μ F normal on the bead, with μ = 2 1 .
Find the speed of the bead ( in m/s ) when it arrives at ( 0 m , − 1 m ) .
Note:
g
=
1
0
m
/
s
2
.
The answer is 1.37.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
I'm impressed. How complex do you think the path can get before purely analytical solutions become impossible? Or perhaps infeasible, if not strictly impossible.
Log in to reply
If you look at my further note, I set out a fairly general case. Obtaining the first integral of the equations explicitly - basically, the energy equation - requires us to perform an integral that could be seriously difficult, if not impossible.
I just have a question, if the path would have been say a Sine wave instead of a circle how would we have dealt with that ?
Log in to reply
Friction F would act tangentially to the curve, and the normal reaction N would act along the principal normal. If the curve was the shape y = f ( x ) , then the position vector of the particle would be r = ( x , f ( x ) ) and we can differentiate this twice to obtain the equation m r ¨ = N + F + m g ( 0 , − 1 ) The only unknown on the RHS is the modulus of N (all the vector directions can be expressed in terms of f ( x ) ). We could take components and thereby eliminate this, obtaining a differential equation for x .
Log in to reply
Actually I am a bit confused about the last equation. How differentiating twice we obtain that. It would be very helpful for me if you please explain it a bit if you have time.
Log in to reply
@Aditya Narayan Sharma – Suppose that the wire has shape given by the equation y = f ( x ) , where f has a minimum at x = 0 . The position vector of the particle is r r ˙ r ¨ = ( f ( x ) x ) = ( f ′ ( x ) 1 ) x ˙ = ( f ′ ( x ) 1 ) x ¨ + ( f ′ ′ ( x ) 0 ) x ˙ 2 and we must have N = λ ( 1 − f ′ ( x ) ) F = μ λ ( f ′ ( x ) 1 ) for some function λ . Recall that F has to be tangential to the curve, while N has to be normal to the curve and upward-pointing. The equation of motion is m r ¨ m ( f ′ ( x ) 1 ) x ¨ + m ( f ′ ′ ( x ) 0 ) x ˙ 2 = N + F + m g ( − 1 0 ) = λ ( 1 − f ′ ( x ) ) + μ λ ( f ′ ( x ) 1 ) + m g ( − 1 0 ) Taking the scalar product of this equation with ( f ′ ( x ) 1 ) and ( 1 − f ′ ( x ) ) , we obtain m ( 1 + f ′ ( x ) 2 ) 2 x ¨ + m f ′ ( x ) f ′ ′ ( x ) x ˙ 2 m f ′ ′ ( x ) x ˙ 2 = μ λ ( 1 + f ′ ( x ) 2 ) − m g f ′ ( x ) = λ ( 1 + f ′ ( x ) 2 ) − m g Eliminating λ yields ( 1 + f ′ ( x ) 2 ) x ¨ + ( f ′ ( x ) f ′ ′ ( x ) − μ f ′ ′ ( x ) ) x ˙ 2 d x d [ 2 1 ( 1 + f ′ ( x ) 2 ) e − 2 μ tan − 1 f ′ ( x ) x ˙ 2 ] = g ( μ − f ′ ( x ) ) = g ( μ − f ′ ( x ) ) e − 2 μ tan − 1 f ′ ( x ) At this point, we would need to know the explicit form of f ( x ) to proceed further...
Log in to reply
@Mark Hennings – Thanks a lot, This was an awesome explanation.
Log in to reply
@Aditya Narayan Sharma – How do you move from step 3 to step 4? How does e − 2 μ θ appear in the step 4?
Log in to reply
@Rohit Gupta – It is a matter of looking for an integrating factor. Since d θ d ( 2 1 θ ˙ 2 ) = θ ¨ , multiplying by e − 2 μ θ is what it takes to make the LHS of the equation exact.
Log in to reply
@Mark Hennings – Well, this is a very clever adjustment. Is there a method to follow to find such integrating factors or one has to do the hit and trail approach to reach to it?
Moreover, in the second equation, μ N − m g sin θ = m r θ ¨ , should it be m g sin θ − μ N = m r θ ¨ ? This is because the speed is increasing, thus the forces in the direction of the speed must be greater.
Log in to reply
@Rohit Gupta – Look up solving first order differential equations for the technique for finding integrating factors. In brief, the integrating factor for the equation d x d y + a ( x ) y = b ( x ) is e ∫ a ( x ) d x
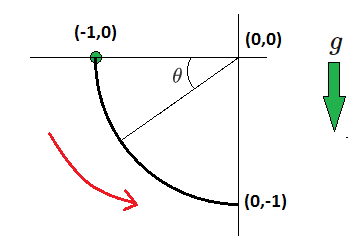
My equation is correct, Firstly, my θ is not the θ that Steven used. It is the angle with the downward vertical. Thus, while θ is positive, θ ˙ and θ ¨ are negative. The tangential component of gravity acts in the direction of negative θ , and the friction force acts in the opposite direction.
@Mark Hennings – the theta' term disappeared because the derivative is wrt theta right? clever!
Log in to reply
@Dhruv G – If you prefer, multiply the whole equation by θ ˙ and then integrate with respect to t .
See @Mark Hennings for a purely analytical approach. I will provide a hybrid analytical-computational solution which eases the mathematical burden, with a computer taking up the slack.
Split the gravitational force into two parts. The tangential component is:
F g t = m g c o s θ
The normal component is (referenced toward the origin):
F g n = − m g s i n θ
Write an expression for the centripetal force in relation to the normal reaction force and the normal component of the gravity force. Let the variable v refer to the bead's speed.
F c = R m v 2 = − m g s i n θ + F n r ⟹ F n r = m g s i n θ + R m v 2
The net tangential force with friction is therefore:
F t = m g c o s θ − μ [ m g s i n θ + R m v 2 ] = m d t d v d t d v = v ˙ = g c o s θ − μ [ g s i n θ + R v 2 ]
Then we can solve iteratively in the following way (I used a time step Δ t = 1 0 − 6 s e c ):
v k = v k − 1 + v ˙ k − 1 Δ t θ k = θ k − 1 + θ ˙ k − 1 Δ t v ˙ k = g c o s θ k − μ [ g s i n θ k + R v k 2 ] θ ˙ k = R v k
Run the algorithm until θ = 2 π . The resulting final velocity comes out to be approximately 1 . 3 7 m / s .
The potential energy at rest at elevation R is dissipated as friction heat energy and is used to speed up the particle's speed (kinetic energy,) and the net difference is the work exhibited by the tangential force displaced R units. The centripetal force is only for changing direction and generates no work as it is normal on displacement.
Potential energy - Friction heat - Kinetic energy = Work of tangential force
cos(a)×PE - u sin(a)×PE - (2u/R)×KE = Ft×R
PE = potential E = m g R KE = Kinetic E = 0.5 m v^2 Fc = centripetal force R = radius of circle a = angle between radius & horizontal axis u = coefficient of friction m = mass Ac = centripetal acceleration = v^2/R v' = dv/dt = At = tangential acceleration Ft = tangential force = m At = m v'
Substitution:
cos(a) m g R - u sin(a) m g R - 2 u 0.5 m v^2 / R = m v' R
(Devide by R)
mg cos(a) - u mg sin(a) - u m Ac = m v'
mg cos(a) - u [mg sin(a) + m Ac] = m v'
Radial forces Fn = normal force = mg sin(a) + m Ac
Ff = frictional force = u Fn Fg = gravitational force = mg
Tangential forces Fg cos(a) - Ff = m At
Let θ be the angle that the radius to the particle makes with the downward vertical, r the radius and m the mass of the particle. If N is the normal reaction, and F = μ N the friction force on the particle, then the radial and transverse equations of motion are: N − m g cos θ = m r θ ˙ 2 μ N − m g sin θ = m r θ ¨ Eliminating N yields m r θ ¨ − μ m r θ ˙ 2 θ ¨ − μ θ ˙ 2 d θ d [ 2 1 θ ˙ 2 e − 2 μ θ ] = m g ( μ cos θ − sin θ ) = r g ( μ cos θ − sin θ ) = r g ( μ cos θ − sin θ ) e − 2 μ θ Since the particle starts at rest when θ = 2 1 π , the particle's speed at angle θ is v ( θ ) 2 = 2 r g e 2 μ θ ∫ θ 2 1 π ( sin θ − μ cos θ ) e − 2 μ θ d θ With r = 1 , g = 1 0 , μ = 2 1 , the particle's speed at the bottom is v ( 0 ) , where v ( 0 ) 2 = 1 0 ∫ 0 2 1 π ( 2 sin θ − cos θ ) e − θ d θ = 5 ( 1 − 3 e − 2 1 π ) and hence the answer is v ( 0 ) = 1 . 3 7 1 7 9 .