Hanging in balance
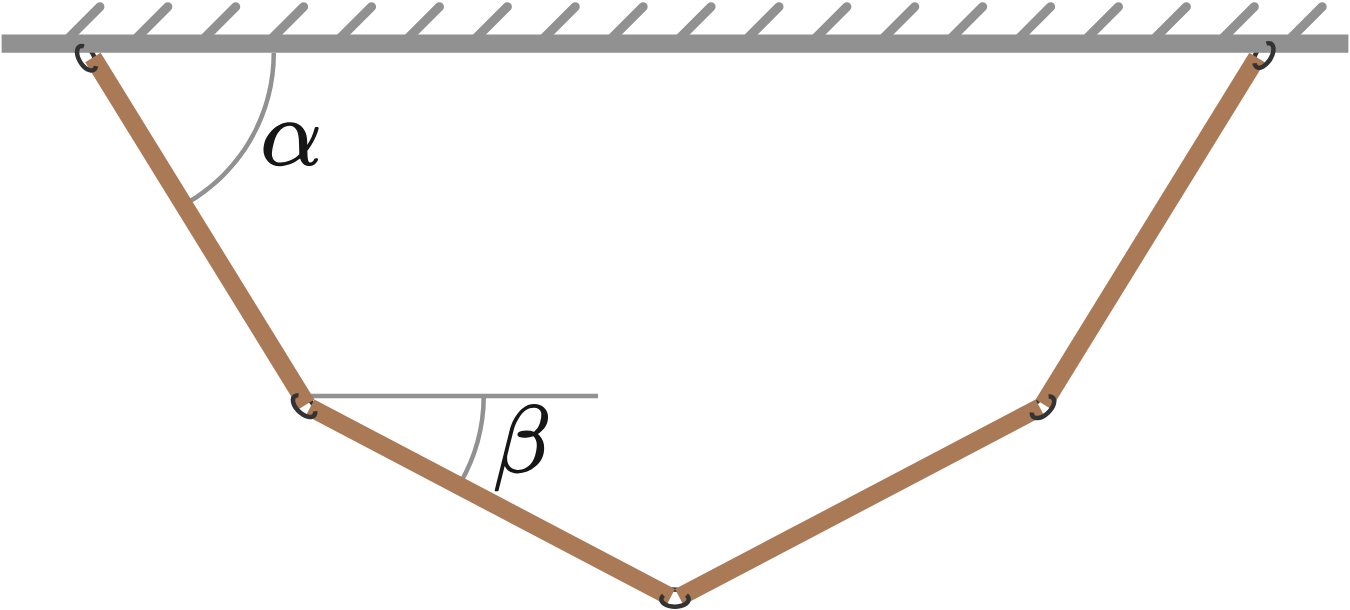
Four identical rods are connected in series and hanging from the ceiling. When the system shown above is in equilibrium, what is tan β tan α ?
Details and Assumptions:
- Assume joints to be perfectly smooth.
The answer is 3.00.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
4 solutions
Great! This is a very creative solution. Although, can you elaborate on a point, how to argue that the tensions T 1 and T 2 will be along the rods only? Or, how will the rod A D apply the tension force on the other two rods?
Log in to reply
That is the point of the joints being smooth. The rods are in tension, and the joints can only transfer those tension forces to the rods to which they are attached.
There will be a tension in the rod A D which is applied to the neighbouring rods - A D will apply a tension T 2 to the rod to its right, just like the rod to its right is applying a tension T 2 to it, and it will also apply a tension to the rod to its left. This rod will be in equilibrium through the action of its weight and the reaction force with the joint on the ceiling. This last force can act in any direction, and so there is no problem keeping this rod in equilibrium.
Log in to reply
Do you mean the force applied by AD will be like this (the orange arrows)? If yes, then why A D is not applying the tension along it like others?
Log in to reply
@Rohit Gupta – No. The tensions in A D will always act parallel to A D . The tension in A D will act on the upper rod in the direction A D , and the tension in A D will act on the right-hand rod in the direction D A .
To be clear, the tensions T 1 , T 2 and W are the forces acting on the "rod and hinges" unit. This cancels out internal forces acting between the parts of the hinges. In Steven's solution, these internal reaction forces are separated out and included separately in the forces acting on each rod, which is why Steven's resultant force at D is horizontal, for example.
Log in to reply
@Mark Hennings – If I am not wrong you meant that T 2 is not the net force acting on the rod A D by the rod on the right of D but it is the tension generated in the right side rod. If this is true then why for rod A D to be in equilibrium, the tensions in the two rods attached to it and the weight of the rod must have concurrent lines of action (or the moment of these forces about C is zero).
According to me, for an object to be in equilibrium net moment of external forces must be zero.
Log in to reply
@Rohit Gupta – Very true, but there are two ways of looking at this problem, both of which are valid. Look at Steven's diagram. This is concerned with the contact forces acting of the rods, and the gravity forces. He does not mark tensions in the rod, because they are internal forces. However, if you (for example) consider the contact forces he has drawn in red (the contact forces acting on the rod I have labelled A D ), then these forces will have the effect of "trying" to stretch the rod. In other words, the rod will be in tension.
My approach to the problem essentially considers the rod A D , together with the hinge (and maybe an infinitesimal amount of the attached rods), so that the contact forces at the hinges become internal, and the only forces acting on the (slightly expanded) rod A D are the two tensions in the rods it is attached to and its weight.
Log in to reply
@Mark Hennings – "maybe an infinitesimal amount of the attached rods" This is really a great idea. Now, I understand what you mean. Thanks, it was a great solution.
@Mark Hennings – So it seems that the two pictures are essentially two sides of the same coin. Mine is just yours with a different set of basis vectors. When I was working out my solution, I assumed that the anchor point on the flat surface was a pin support (capable of producing forces at the point of contact but no moment about that point). This gives a unique "Fx" value. If it was a "fixed support", capable of generating forces and a moment, it seems there could be many possible solutions (resulting in an indeterminate system). For example, I could have chosen a smaller value for "Fx" and had the fixed support generate a moment to balance the torque. That's why in my recent "Statics Exercise" problem, I explicitly specified pin supports. Am I correct about this? And since there are many fixed supports in nature, is this apparent paradox (assuming I was right earlier) simply the result of the overly simplistic models we use?
Log in to reply
@Steven Chase – The joints cannot produce torque, yes. That is why I, in a report, asked for the joints to be specified as smooth. If the joints were rough, things would be very different. For example, you can hold a rusty hinge with one flange vertically down and the other sticking out horizontally!
@Mark Hennings , from where you draw physics diagrams?
Log in to reply
I use a variety of software. I use a classroom demonstration programme a lot of the time, copying screenshots "off the board", and sometimes Geometer's Sketchpad or Mathematica, depending on what I want to draw. That said, someone at Brilliant has taken my original diagram and reworked it with their own software, so the picture now here is in content identical to my original, but is not the picture I drew.
Does line AC BC and and DC meet at same point forming right triangle ? How do we prove that ?
Log in to reply
If ∠ A C D = 9 0 ∘ , then α + 3 β = 9 0 ∘ , and this would force α and β to be particular angles. Since the two ends of the rods can be attached to the ceiling a variety of distances apart, this angle condition will not be true in general.
Here was my chain of reasoning:
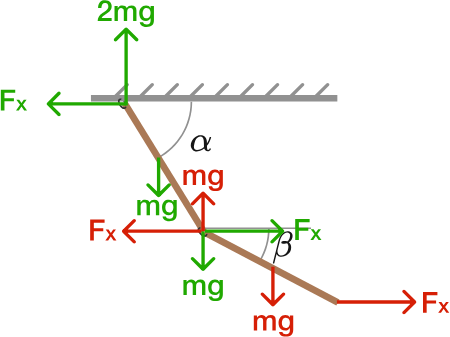
1) The entire set of four rods has a weight of 4 m g , which is evenly distributed between the two anchor points (see above).
2) The upward 2 m g force on the first rod is balanced by the weight ( m g ) at its midpoint, and by a downward force with magnitude ( m g ) supplied by the second rod.
3) With respect to the anchor point, the torque (clockwise) on the first rod due to the vertical forces is equal to:
τ v 1 = m g 2 l 1 cos ( α ) + m g l 1 cos ( α ) = 2 3 m g l 1 cos ( α )
4) This torque must be balanced by a rightward horizontal force supplied by the second rod:
2 3 m g l 1 cos ( α ) = F x l 1 sin ( α ) F x = 2 3 m g cot ( α )
This force is balanced by a horizontal reaction force at the anchor point.
5) By Newton's Third Law, the forces supplied by the second rod to the first rod must be reciprocated (with opposite sign) by the first rod. See the diagram. It is therefore apparent that the vertical forces on the second rod are balanced.
6) In order for the horizontal forces on the second rod to balance, another horizontal force of value F x (rightward) must be supplied by the second rod's mirrored equivalent (not shown).
7) With respect to the contact point with the first rod, the torque (clockwise) on the second rod due to the vertical forces is equal to:
τ v 2 = m g 2 l 2 cos ( β ) − F x l 2 sin ( β )
8) Substituting in the known value of F x and applying the torque equilibrium condition for the second rod gives:
m g 2 l 2 cos ( β ) − 2 3 m g cot ( α ) l 2 sin ( β ) = 0 m g 2 l 2 cos ( β ) = 2 3 m g cot ( α ) l 2 sin ( β ) cos ( β ) = 3 cot ( α ) sin ( β ) tan ( β ) 1 = tan ( α ) 3 tan ( β ) tan ( α ) = 3 .
Or you could have started with the point of symmetry of the figure and figured out that the forces can only be horizontal since otherwise there is a bias to one of the parts of the rod.
Log in to reply
We may also say the same through symmetry arguments. The forces on the two halves should be mirrored about the axis of symmetry.
Why answerwas 3.00
@Steven Chase Doesn't the second rod's mirrored equivalent also exert a force along the vertical on the second rod?
Log in to reply
No, because there would have to be an equal and opposite vertical pair force. And because of symmetry, there is no way to choose which side should get the "up" force and which way should get the "down" force. The horizontal forces are symmetrical about the central axis, so there is no arbitrary distinction to be made between the two halves.
No, we can say this directly from the symmetry arguments and Newton's third law.
From symmetry, the forces on the second rod and its mirror equivalent should be mirror images of each other. Let the force on the second rod (by its mirrored rod) is vertically down then the force on the mirrored rod should also be vertically down.
However, by Newton's third law, these forces should be equal and opposite, therefore, they should not be in the same direction.
The only possible way to remove this conflict is to have these vertical forces to be zero.
Log in to reply
"Nature is not whimsical" is a useful heuristic to employ while doing classical mechanics exercises.
@Steven Chase @Rohit Gupta Thank you! I understand how the symmetry argument works (intuitively). Can it be made more rigorous?
Log in to reply
Probably so. Just assume that there is a vertical force. Then show that stasis can't be achieved in that case (with equations). Or show that some contradiction inherently arises.
I started with the same approach but made a silly mistake.
Assuming 2L to be length of each rod, since horizontal distance between the 2 fixed ends to be constant,cosα +cosβ=constant. dβ/dα = -sin(α)/sin(β). To have minimum potential energy of the system the height of the centre of mass of the system should be minimum=H=Lsin(α)+(2Lsin(α)+Lsin(β)). Making dH=0 , dβ/dα = - 3cos(α)/cos(β) . Equating both we get tan(α)=3tan(β).
That's very innovative! +1
Very good solution.Much better than others
Let the rods have length 2 ℓ . The horizontal force components at the ends of the rods are are equal to F in opposite directions, resulting in torques in the same direction relative to each rod's center of mass; i.e. the torque due to the horizontal force components on each rod is equal to τ x = 2 F ℓ sin θ . ( θ = α , β ) The vertical force components on each are equal to the weight of the rods suspended from each point, i.e. 2 m g for the top joints, m g for the central joints, and zero for the bottom joint. For each joint these vertical components have opposite directions, resulting in torques in the same sense. Thus τ y , α = − ( 2 m g + m g ) ℓ cos α ; τ y , β = − ( m g + 0 ) ℓ cos β . Equilibrium requires that for every rod the torques τ x , τ y are balanced, so that 3 m g ℓ cos α = 2 F ℓ sin α ; m g ℓ cos β = 2 F ℓ sin β . Therefore tan β tan α = cos α sin β sin α cos β = m g ⋅ 2 F 3 m g ⋅ 2 F = 3 .
Further to elaborate, the important point here is its free body diagram in which we get that the force at the lower end of the bottom rod is horizontal and not vertical. Once we establish it then we can draw the rest of the forces and write equations for its force and torque equilibrium just like you did.
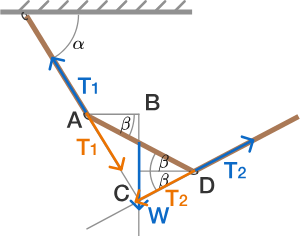
Consider the rod A D . For this rod to be in equilibrium, the tensions in the two rods attached to it and the weight of the rod must have concurrent lines of action (so that the moment of the forces about C is zero).
If the rod A D has length 2 L , then A B = L cos β , while B C = 3 L sin β (there are three right-angled triangles that can be used to calculate B C . Thus tan α = A B B C = 3 tan β . making the answer 3 .