Hello Bobbin
A bobbin rolls without slipping on a horizontal surface so that the velocity of the end of the thread (point ) is directed along the horizontal. A board hinged at point leans against the bobbin making an angle with the horizontal. The inner and outer radii of the bobbin are and respectively.
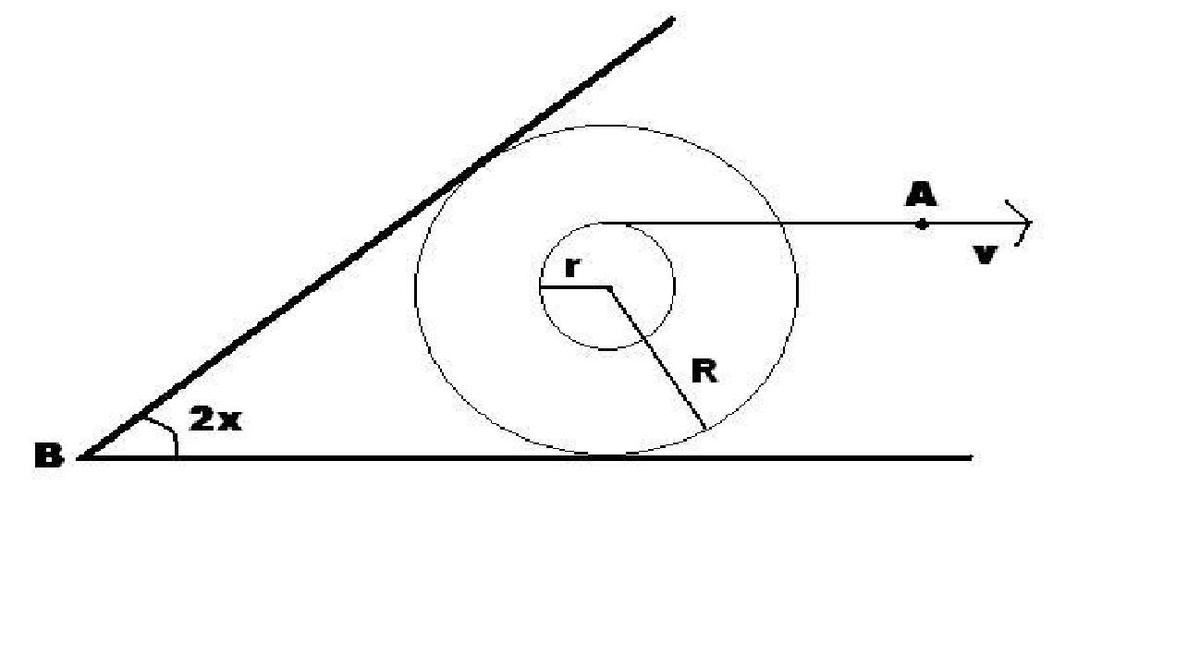
If the angular velocity of the board can be expressed in terms of as , find the magnitude of .
The answer is 2.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
From pure rolling condition, we have the velocity of the center of the bobbins as r + R v R .
Now let s denote the displacement of the center of the bobbin with respect to point B along the horizontal. Then
S d x d s d t d s d x d t = = = R cot x − R csc 2 x − R csc 2 x
But as s increases, x decreases, i.e.: d x is negative for positive d s . Therefore, the minus sign will be neglected. Also d t d s is the velocity of the center of the bobbin. Hence
r + R v R d x d t = R csc 2 x ⇒ d t d x = sin 2 x r + R v .
Also 2 d t d x is the required ω :
ω = 2 sin 2 x r + R v = r + R 2 v sin 2 x .
Hence, (k = 2 ).