Linearised 2-DOF Vibration Analysis
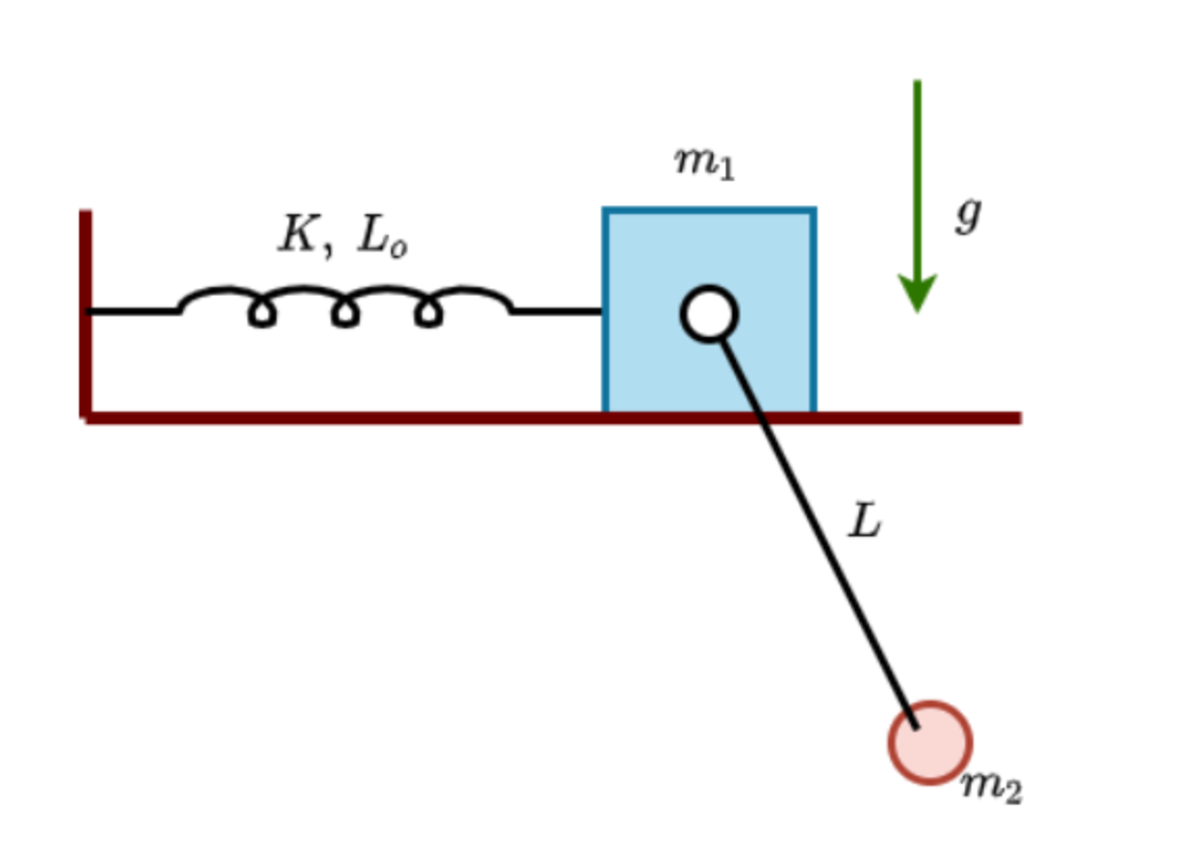
The system shown in the diagram comprises of two masses connected by a massless rigid rod of length . This rod, which can freely rotate about its hinge, is hinged at the blue block at one end. The other end of the rod is attached to a bob, as shown in the diagram. The blue block is constrained to move along a fixed horizontal surface. The spring is fixed at one end to a vertical wall and the other end is attached to the blue block. The goal of this problem is to analyse small vibrations about the equilibrium configuration of this system. Enter your answer as the sum of squares of the natural frequencies of small oscillations about the stable equilibrium point.
Note:
-
-
is the natural length of the spring.
-
Treat all masses as point objects.
-
The bob's motion and that of the blue block are confined to the same plane.
Hint: Find the equations of motion of this system and evaluate the configuration at which the system is in stable equilibrium. Then, linearise the equations about the equilibrium point, and proceed.
The answer is 22.5.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
Let the coordinate system's origin be placed at the point of attachment of the spring with the wall. X-axis is horizontal to the right and Y axis is vertically up. The coordinates of the point masses are:
x 1 = x y 1 = 0 x 2 = x + L sin θ y 2 = − L cos θ
θ is the angle the rod makes with the vertical. Now, the kinetic and potential energies of the system are:
T = 2 m 1 ( x ˙ 1 2 + y ˙ 1 2 ) + 2 m 2 ( x ˙ 2 2 + y ˙ 2 2 ) T = 2 ( m 1 + m 2 ) x ˙ 2 + m 2 L x ˙ θ ˙ cos θ + 2 m 2 L 2 θ ˙ 2
V = 2 K ( x − L o ) 2 − m 2 g L cos θ
Since there are no dissipative forces acting on the system, the total energy of the system is conserved. The total energy is constant and therefore, its time derivative is zero.
E = T + V d t d E = ( f 1 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) ) x ˙ + ( f 2 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) ) θ ˙ = 0
Where:
f 1 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) = ( m 1 + m 2 ) x ¨ + m 2 L cos θ θ ¨ − m 2 L sin θ θ ˙ 2 + K ( x − L o ) f 2 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) = m 2 L cos θ x ¨ + m 2 L 2 θ ¨ + m 2 g L sin θ
Now, the only way for the time derivative of energy to be zero for a system undergoing motion is if: f 1 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) = ( m 1 + m 2 ) x ¨ + m 2 L cos θ θ ¨ − m 2 L sin θ θ ˙ 2 + K ( x − L o ) = 0 f 2 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) = m 2 L cos θ x ¨ + m 2 L 2 θ ¨ + m 2 g L sin θ = 0
If x ˙ = 0 and θ ˙ = 0 , that is the trivial 'no-motion' solution which is of no interest to us. Thus, the equations of motion are obtained. The equations can also conveniently be found using Lagrangian or Hamiltonian mechanics.
Having found the equations of motion, and with a little bit of intuition, one can conclude that when x = L o , x ˙ = x ¨ = 0 and θ = θ ˙ = θ ¨ = 0 , the system is in stable equilibrium. The next step is to linearise this system about this equilibrium point. Let the system be displaced slightly such that x = L o + x L and θ = 0 + θ L where x L and θ L are small in magnitude. Then, the following Taylor expansion can be performed:
f 1 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) ≈ f 1 ( L o , 0 , 0 , 0 , 0 , 0 ) + ( ∂ x ∂ f 1 ∣ ∣ ∣ ∣ e q x L ) + ( ∂ θ ∂ f 1 ∣ ∣ ∣ ∣ e q θ L ) + ( ∂ x ˙ ∂ f 1 ∣ ∣ ∣ ∣ e q x ˙ L ) + ( ∂ θ ˙ ∂ f 1 ∣ ∣ ∣ ∣ e q θ ˙ L ) + ( ∂ x ¨ ∂ f 1 ∣ ∣ ∣ ∣ e q x ¨ L ) + ( ∂ θ ¨ ∂ f 1 ∣ ∣ ∣ ∣ e q θ ¨ L )
Here, all derivatives at evaluated at the equilibrium point which corresponds to x = L o , x ˙ = x ¨ = 0 and θ = θ ˙ = θ ¨ = 0 . After performing these evaluations and doing the same for f 2 gives the linearised equations of motion which are:
f 1 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) ≈ ( m 1 + m 2 ) x ¨ L + m 2 L θ ¨ L + K x L = 0 f 2 ( x , x ˙ , x ¨ , θ , θ ˙ , θ ¨ ) ≈ m 2 L x ¨ L + m 2 L 2 θ ¨ L + m 2 g L θ L = 0
The equations of motion can be rearranged in a matrix form as such:
[ m 1 + m 2 m 2 L m 2 L m 2 L 2 ] [ x ¨ L θ ¨ L ] + [ K 0 0 m 2 g L ] [ x L θ L ] = [ 0 0 ]
M ˉ q ¨ + K ˉ q = 0
Thus, the linearised equations of motion are written in the above form. Here, M ˉ and K ˉ are known as the mass and stiffness matrix respectively. Now, let us assume the solution to be of the following form:
q = A v sin ( ω t + ϕ )
Here v is an unknown column matrix of length 2 and A is an unknown scalar. Plugging these values into the linearised system of equations of motion:
− ω 2 M ˉ v A sin ( ω t + ϕ ) + K ˉ v A sin ( ω t + ϕ ) = 0 − ω 2 M ˉ v + K ˉ v = 0
( M ˉ − 1 K ˉ ) v = ω 2 v This is an eigenvalue problem, the eigenvalues of which are ω 2 . Finding the characteristic equation and solving for the sum of eigenvalues gives us the required answer of 2 2 . 5 after plugging in all parameters. This method can be used to solve linear vibration problems as well. I have posted problems on such systems earlier.