Mass Hanging from Two Springs
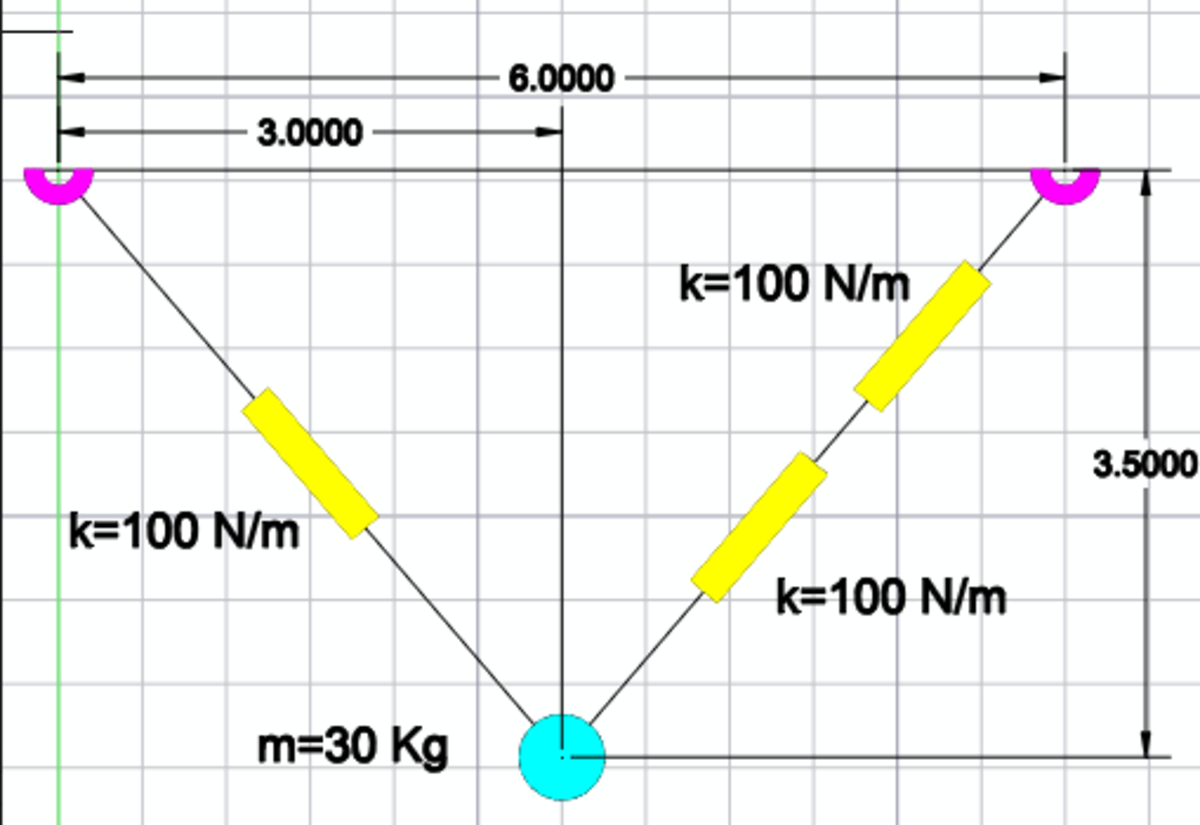
Initially at rest, a 30 Kg mass supported by springs is released and falls downward until it reaches equilibrium. The spring constant is k=100 N/m and the springs are configured as shown in the diagram. The supports are 6 meters apart and the mass is initially at a vertical distance of 3.5 meters from the supports. Take g=9.81 m/s^2. What is the final distance from the right support in meters? Provide your answer to the nearest 1/10th. Note: The springs are un-stretched and the distance from the right support is the resultant distance from the x and y components.
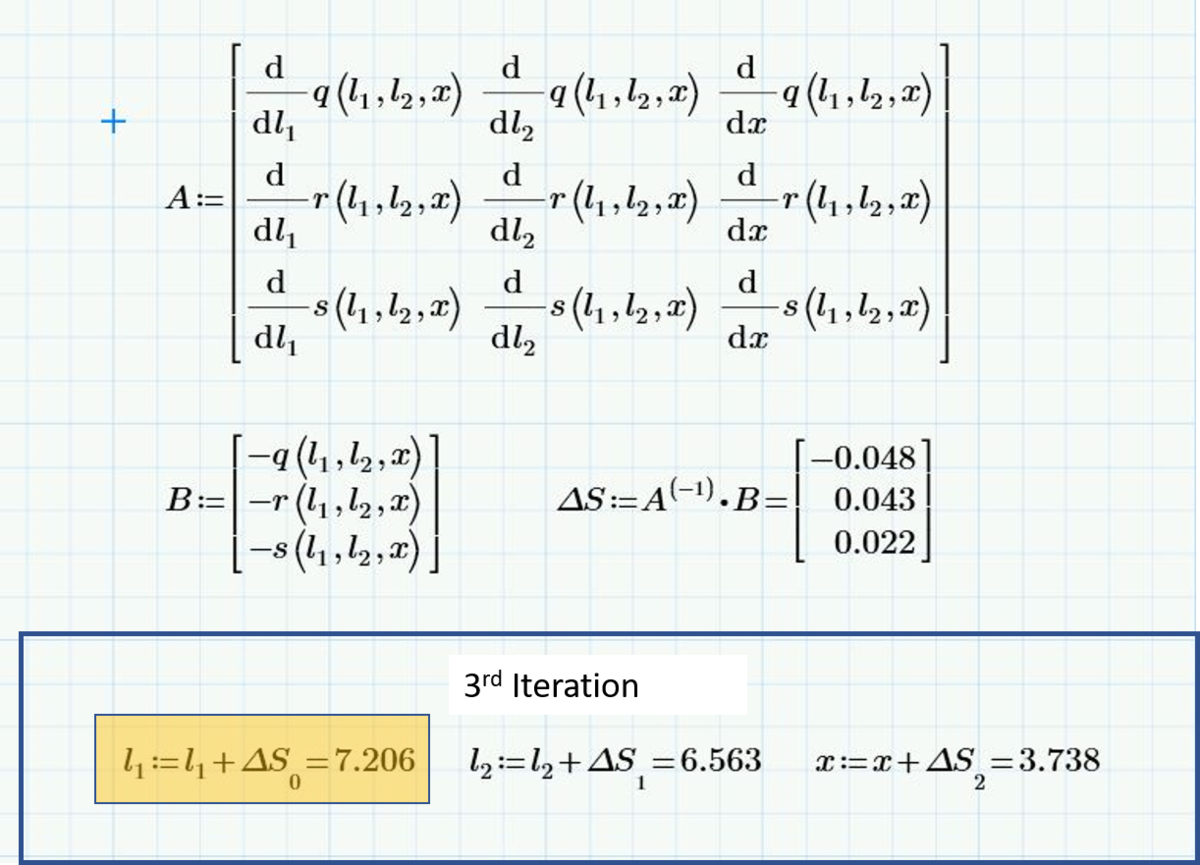
The answer is 7.2.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
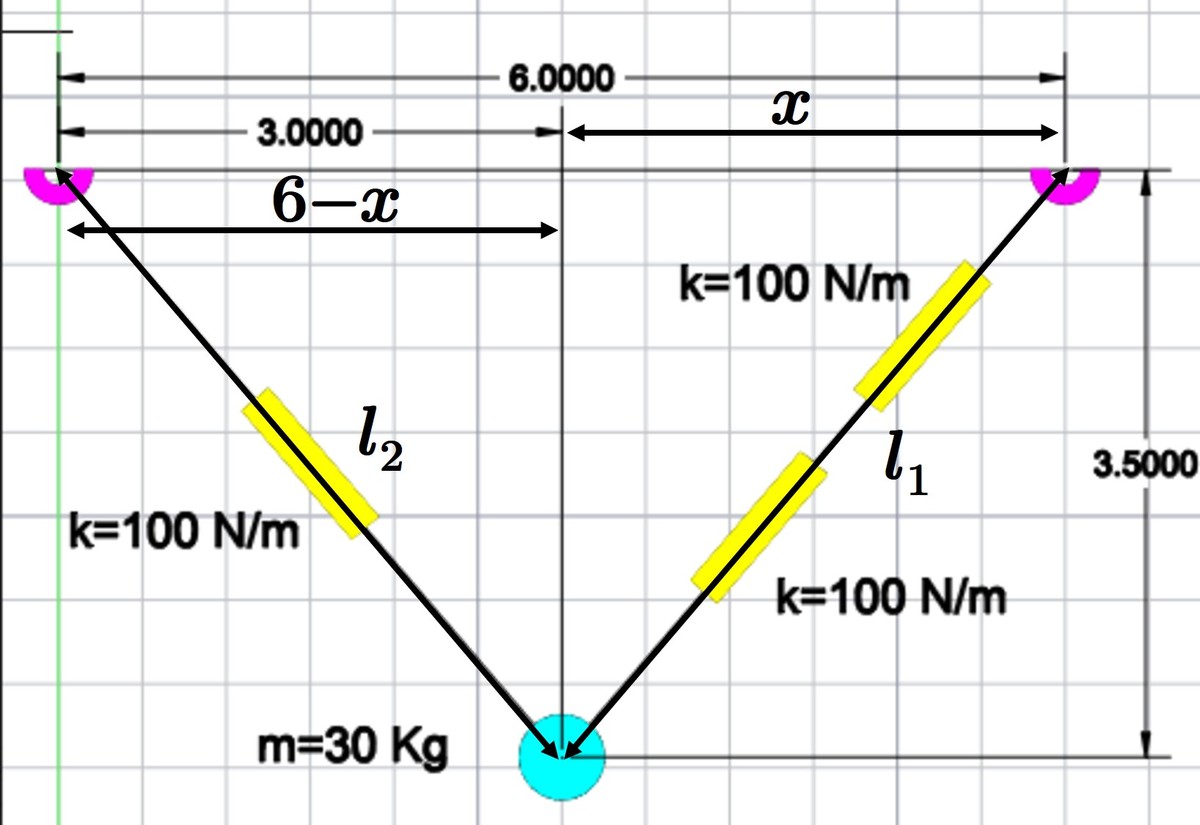

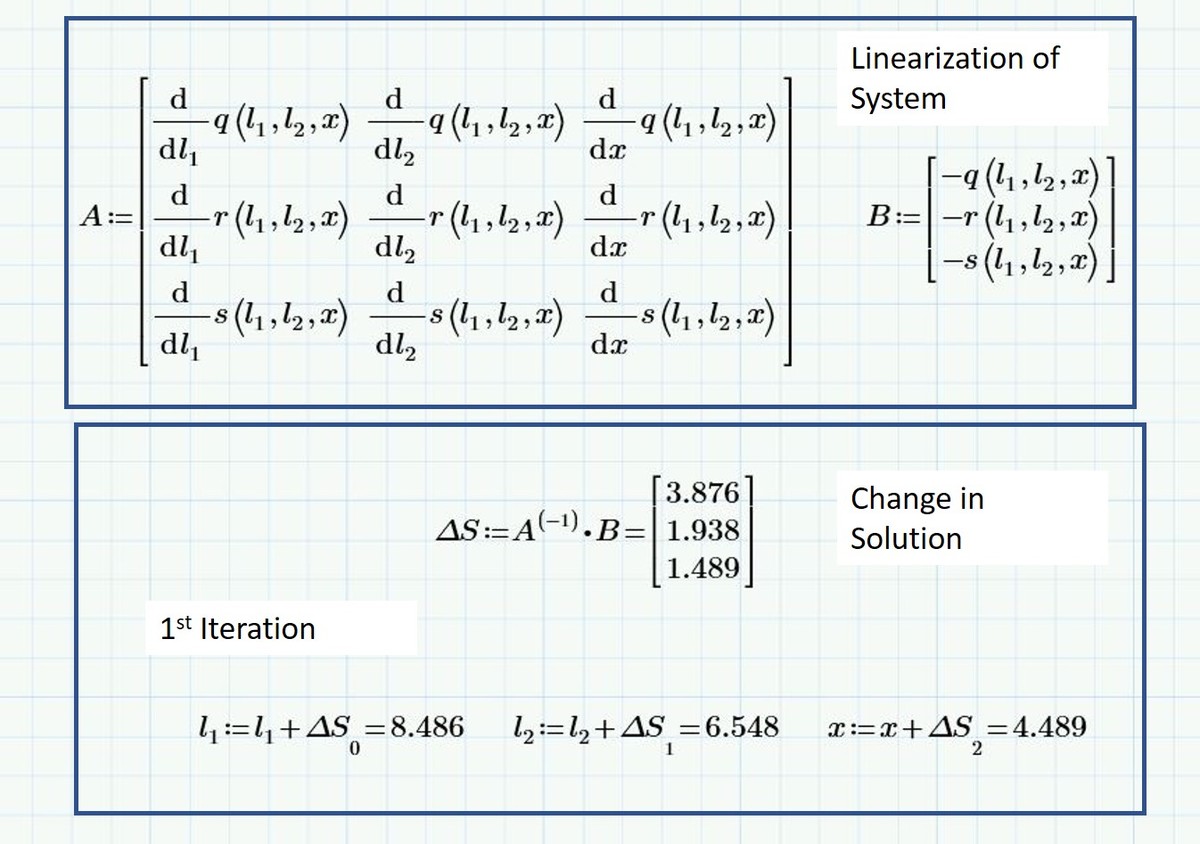
The approach of my choice is the minimization of the potential energy of the mass.
Let the general coordinates of the mass be ( x , y ).
The potential energy of the mass is then:
V = m g y + 2 1 0 0 ( x 2 + y 2 − L ) 2 + 2 5 0 ( ( 6 − x ) 2 + y 2 − L ) 2
At stable equilibrium, the potential energy is globally minimized. The point at which this takes place is then used to compute the required answer. One can solve this by computing partial derivatives and using Newton-Raphson, however, I chose a brute force approach of parameter space sweeping.