No SHM here
Difficulty: Moderate.
A pendulum hinged at the origin of point-mass m = 1 k g with string length l = 1 m is dropped from an angle θ = 2 1 π radians, with respect to the negative y -axis (see below for the coordinate system) .
However, this time, there is basic drag force, dependent on the velocity of the point-mass, given by:
F d = − C d r a g l θ ˙
This drag force opposes the motion of the mass.
Find the time it takes for the bob to reach x = 0 or θ = 0 , after the bob swings fully to the left . In other words, find the time it takes for the second instance where the bob reaches θ = 0 . Enter your answer in seconds to 1 decimal place.
Try to use numerical methods to solve; integrals will not help you here due to the complexity of the EOM.
Note:
- Here gravity is in the negative y direction, and equal to 1 0 m / s 2
- C d r a g = 1
- θ ˙ is the first derivative with respect to time of θ
- see how θ is defined in the GIF above
The answer is 1.69.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
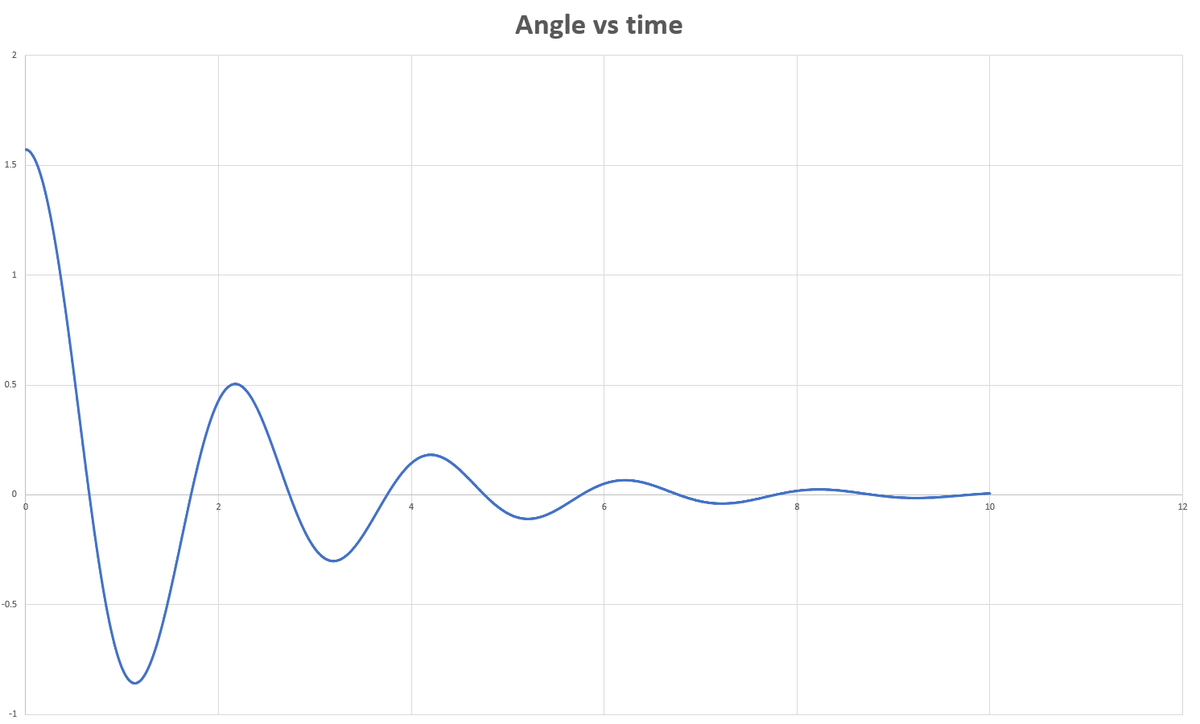
This was a fun problem. I divided the simulation into different time periods to keep track of how long each part takes. It takes the pendulum ≈ 0 . 6 6 0 seconds to swing from its starting position to θ = 0 . Then from the extreme left position, it takes ≈ 0 . 5 8 2 seconds to move back to θ = 0 . Relative to the very start of the simulation, the pendulum crosses θ = 0 from the left at time t ≈ 1 . 7 1 4 8 . This differs slightly from the expected answer. I used explicit Euler with time steps of 1 0 − 5 and 1 0 − 6 . I have attached a graph of angle vs time as well.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 |
|
Woah that's so cool how you produced nearly the exact same graph as me. They look so similar. I like how you directly simulated by calculating force at each point rather than simply numerically integrating the EOM. I may use that approach in some of my upcoming problems!
I wonder... maybe the difference in integration method caused the slight difference. Either-way, the graphs both show the exact same results. Thanks for posting the solution.
Log in to reply
What result do you get when you use a time step of 1 0 − 5 or 1 0 − 6 ?
Log in to reply
I get around 1.69 (converging to 1.7)
Log in to reply
@Krishna Karthik – I suspect that there is some other slight discrepancy in how we are doing calculations. Because with time steps that small, both integration methods should agree very closely. But the results are close enough for me. Thanks for posting
Log in to reply
@Steven Chase – Oh I rechecked, and it seems there is a slight discrepancy in my code, that made it less accurate originally when . The timestep (when ran the program) was 1 0 − 2 when I thought it was 1 0 − 6 , and clearly isn't small enough. I re-ran and put in 1 0 − 6 , which gives me the exact same answer as you, to 4 decimal places.
Well, I would update the solution if I could, but it won't allow. Since you have entered the exact answer and it did mark you as a solver, I hope there will be no problem for future solvers...
Log in to reply
@Krishna Karthik – Brilliant's decimal answer format counts an attempt correct if it is within 3 percent of the expected answer. So it should be OK
Edit: it seems there was a slight miscalculation in my program, and when originally entering the answer, I accidentally set time-step to 1 0 − 2 , something which was left over from graphing. I rechecked, and the more precise answer is 1.714826 seconds
I'm going to use the Newtonian model to derive the equation of motion, although this can be done the Lagrangian way, by introducing a dissipative term into the Euler-Lagrange equation. The maths is harder by Lagrangian, however:
d t d ∂ x ˙ ∂ L = ∂ x ∂ L + ∂ x ∂ D
The force of gravity acting on the particle tangentially is:
F t a n g e n t i a l = − m g sin ( θ )
The force of drag acting opposite to θ ˙ is:
F d = − l θ ˙
Total force:
m θ ¨ = − m g sin ( θ ) − c θ ˙
I numerically integrated this till time t = 1 0 seconds, and plotted θ and time values.
The dampening force is acting well, and it looks realistic. The amplitude of each swing reduces due to drag; the dissipated energy increases after each swing. Here's an energy statistics graph:
I plotted with time-step 1 0 − 2 , but used Runge-Kutta 4th Order, which is more ideal for oscillating motion.
Here's my code (time-step 1 0 − 6 ):