Paraboloid with Friction
A particle of mass m = 1 slides on the inside of the paraboloid surface z = x 2 + y 2 . The surface has friction coefficient μ = 0 . 3 . The ambient gravitational acceleration is 1 0 in the negative z direction.
At time t = 0 , the particle's position and velocity are:
( x , y , z ) = ( 2 , 0 , 4 ) ( x ˙ , y ˙ , z ˙ ) = ( 0 , 1 0 , 0 )
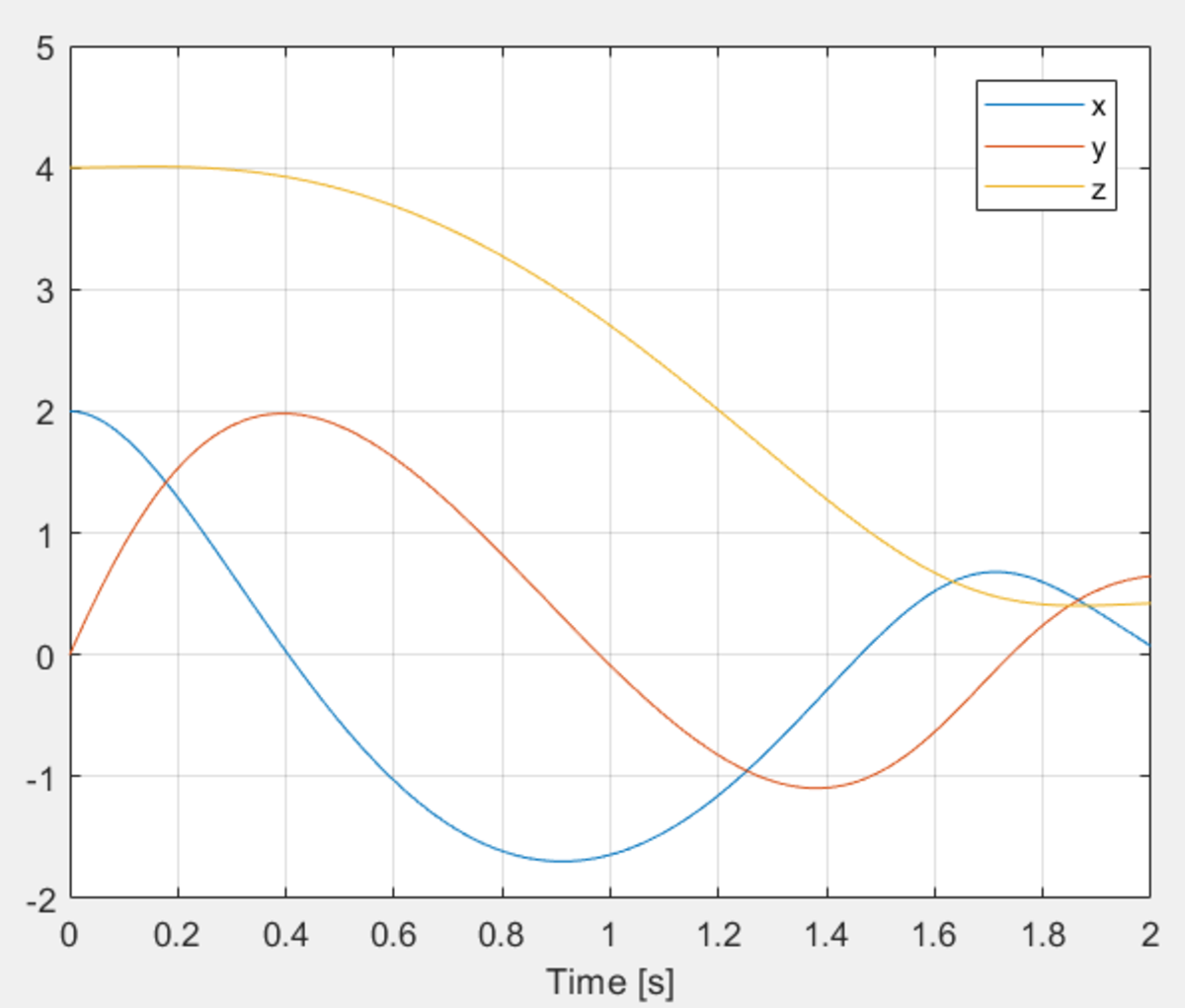
At time t = 2 , what is the z coordinate of the particle?
The answer is 0.423.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
Consider the position of the particle to be:
r = x i ^ + y j ^ + ( x 2 + y 2 ) k ^
⟹ v = d t d r = x ˙ i ^ + y ˙ j ^ + ( 2 x x ˙ + 2 y y ˙ ) k ^
The unit velocity vector can be denoted as:
v ^ = ∣ v ∣ v
A unit vector normal to the inner surface directed towards the increasing Z direction is:
Φ = z − x 2 − y 2 = 0 n ^ = ∣ ∇ Φ ∣ ∇ Φ
Let the normal force magnitude be N . Let the gravity vector be:
g = − 1 0 k ^
The equations of motion of the particle according to Newton's law are:
m d t d v = m g + N n ^ − μ N v ^
This gives rise to three equations and there are three unknowns which are x ¨ , y ¨ and N . The equations are linear with respect to the unknown variables. The resulting equations are very large and require significant simplification, and are of a nonlinear nature, so they cannot be solved analytically. I have taken a numerical route. I have left out simplifications and the subsequent number crunching, in this solution. I will add those details later if requested.
Nice solution. Did you use a linear algebra solver to deal with the 3 × 3 system?
Log in to reply
Yes, I did. It was tedious, to be honest. And typing that out would have been time-consuming as well.
Log in to reply
Can you spot any significant difference between our solutions? I didn't end up having to call a linear solver routine.
Log in to reply
@Steven Chase – The principle is the same (2nd law). Although, the manipulation is different. I was wondering if this can be done in a Lagrangian framework? Is there a friction potential function of some sort? That would even take away the need for vector manipulation.
Log in to reply
@Karan Chatrath – This can be done in certain trivial cases. For example, modeling a block sliding on a rough horizontal surface can be done using the Lagrange approach. Because the friction behaves exactly like horizontal gravity. However, the solution is only valid until the block stops for the first time. For a problem like this one, I have no idea how to make a potential function for the friction.
@Karan Chatrath has posted a nice solution summary. I will post mine as well, just to give some extra coverage and perspective.
Derive an acceleration constraint equation:
z = x 2 + y 2 z ˙ = 2 x x ˙ + 2 y y ˙ z ¨ = 2 x x ¨ + 2 y y ¨ + 2 x ˙ 2 + 2 y ˙ 2
Now write the Newton's Second Law equations. In these, u 1 is the normal vector which can be calculated as explained at this link , and u 2 is a unit vector in the opposite direction as the particle velocity. F g is the gravitational force. N is the magnitude of the normal force.
x ¨ = F g x + N u 1 x + μ N u 2 x y ¨ = F g y + N u 1 y + μ N u 2 y z ¨ = F g z + N u 1 z + μ N u 2 z
Plug these three equations into the acceleration constraint equation to solve a single equation for N . Then knowing N , calculate the acceleration components. This approach requires a bit of algebraic manipulation, but does not require any calls of a linear algebra routine. Numerical integration takes care of the rest.