Problem in General Mechanics
Two light rigid rods each of length
l
are connected by a hinged joint.
A
particle of mass
m
is attached at the joint and two thin cylinders
B
of mass
m
and
C
of mass
2
m
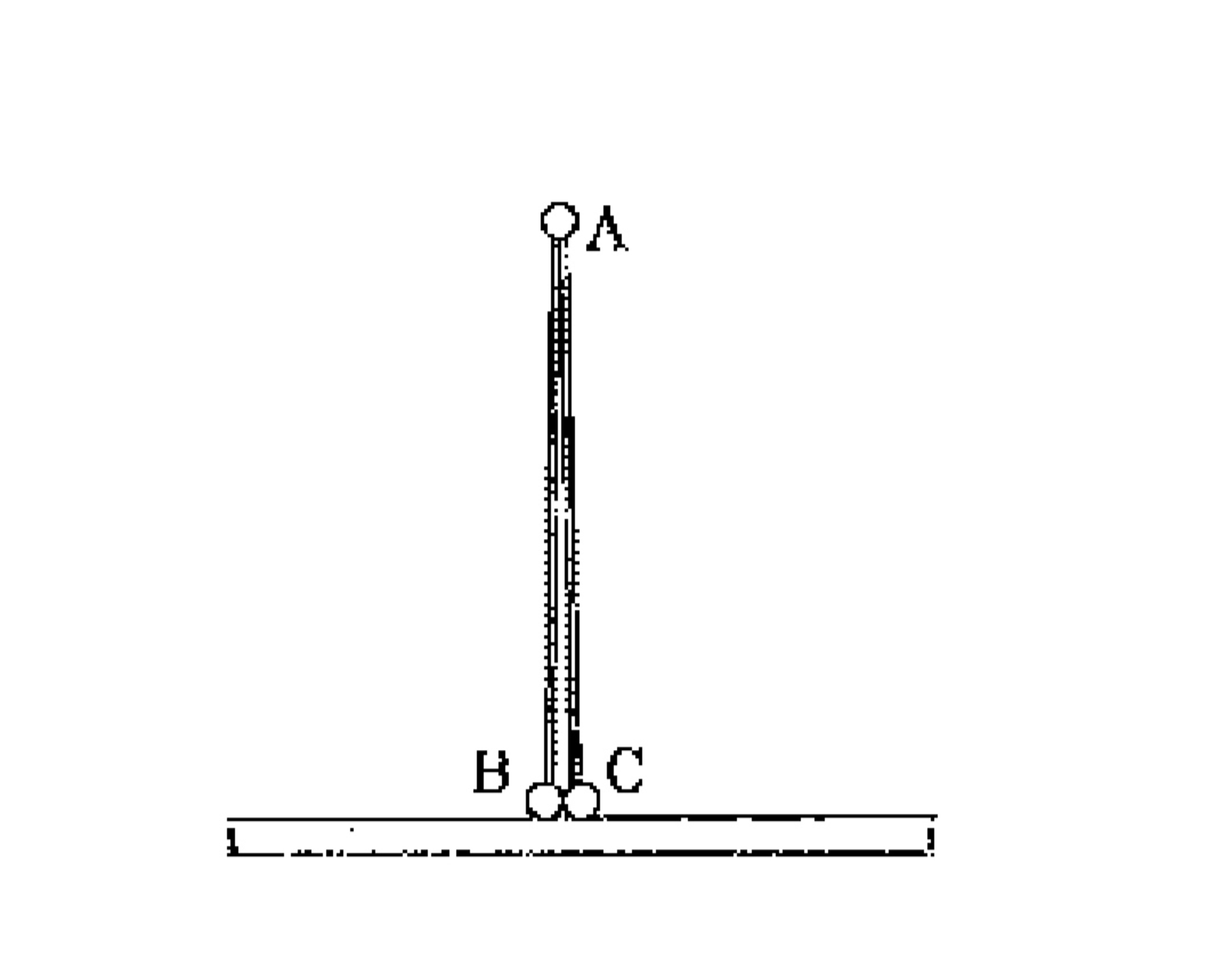
are attached at the free ends of the rods perpendicular to the rods. The assembly is held motionless with rods vertical and cylinders
B
and
C
touching each other on a frictionless horizontal floor as shown in the figure. After the assembly is released, the rods rotate, the cylinders move apart and finally the particle A hits the floor. Find the speed of point
A
when the rod makes an angle
θ
with horizontal
.
Details and Assumptions
1)
l
=
5
2)
g
=
1
0
3)
θ
=
6
0
°
The answer is 1.311.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
1 solution
@Steven Chase Hey; nice one. That's exactly how I did it, after 30 minutes of toiling with derivatives.
Btw, how would it be done using a force-computation simulation method?
Log in to reply
That's an interesting question. It might be possible. You could write out the contraints (rod length rate of change equals zero, and then take another time derivative to get acceleration relationships). Then write out the 2nd Law equations in terms of some unknown rod tensions and surface reaction forces. Then plug those into the constraint equations to solve for the unknown forces.
Log in to reply
True. I guess this is why such a problem would be benefitted with a Conservation of Momentum, Conservation of Energy, or Euler-Lagrange solution.
If you are interested, you can look up the method of dynamic equilibrium and virtual work (also called virtual power sometimes) in mechanics. It provides a framework within which you can account for the constraint forces (tensions, contact forces, etc.) in the equations of motion without actually drawing free body diagrams. It is a very powerful technique to solve complicated mechanics problems. It is tedious to work with that technique using pen and paper but very useful in a computational setting.
Log in to reply
Hmmm. Nice. Thanks for recommending, mate!
@Karan Chatrath Also, if you don't mind, could you show me how it could be used for solving some of my classical mechanics problems (like the simulating dynamics series) just to get an idea of how it's applied? I'm gonna do some reading on it too, btw.
I can see why it is so useful in engineering.
Log in to reply
@Krishna Karthik – Perhaps some other time. The explanations would take me quite a bit of work. On second thought, I recommend it as a casual read and nothing more. No need to deep dive. Just know that such techniques exist. I would suggest spending time in improving your understanding of the first principles of classical physics.
Log in to reply
@Karan Chatrath – What would you say are the first principles?
Log in to reply
@Steven Chase – I consider the laws of motion and that of energy conservation to be the most fundamental principles of classical mechanics. For E&M I think Maxwell's equations serve as the fundamenal laws. Gaining proficiency in applying the laws of mechanics correctly took me years of practice and I am still far from proficent in the field of E&M.
This comment is taking me time to type out and as I think more, the principle of least action is also a part of the fundamentals as it is in some way applicable in many areas of physics.
Log in to reply
@Karan Chatrath – @Karan Chatrath Exactly, your words are very true.
@Karan Chatrath – I think Least Action was applied to General Relativity as well, by Feynman.
For me, the most fundamental principles are COE and Least Action. Maybe even Newton's laws. However, literally everything in mechanics can be derived from COE and Newton's second law.
I haven't really learned that much about E&M, but in Uni I hope to learn a lot about modern physics.
I kind of want to learn about Tensor Algebra and Tensor Calc. before going into General Relativity.
Are you into a lot of Modern Physics, or do you mainly only use Classical Mechanics, since you are a mechanical engineer?
Log in to reply
@Krishna Karthik – To quantum mechanics, actually. The classical action is central to the path integral formulation of QM.
Log in to reply
@Steven Chase – @Steven Chase Did you have studied QM whole??
Log in to reply
@Talulah Riley – I've scratched the surface, but just barely
@Steven Chase – Just taking a look at the mathematics makes me scared lol. I hope I get there some day...
Log in to reply
@Krishna Karthik – You should try my quantum well problems
Log in to reply
@Steven Chase – I'll try them out soon. I'll also read a bit about QM as well.
Log in to reply
@Krishna Karthik – @Krishna Karthik A nonsense can only do this thing that without studying E and M, he going to study QM. Wow!
Log in to reply
@Talulah Riley – You only really need knowledge of probability and Linear Algebra for QM. I've looked at the brilliant course; QM prerequisites don't include E and M.
But classical mechanics is quite fundamental. I know the theory behind a lot of E and M, and the basics, but I'm not able to solve a lot of the advanced circuit problems and field problems. But I know the basics and can watch lectures.
@Karan Chatrath – @Karan Chatrath I agree. Such techniques are quite complicated. I should probably work on the maths required for the more mathematically demanding aspects of Classical Mechanics, and maybe look into more complicated subjects within CM before looking at these simulation techniques.
I think one should master in classical mechanics and E and M. And then he should go for QM
Log in to reply
I should try. Certainly. I know the basics, like Flux, Coulomb's law, and really basic circuitry. However, Quantum Mechanics I think isn't closely related to any areas of physics; it's an entirely new world. You only really need good mathematical ability to understand some of it.
Since the rods have the same length, both rods necessarily make the same angle θ with the horizontal. And we also need to define one more parameter, which is the horizontal coordinate of mass C . Call this x C . The Lagrangian has three kinetic energy terms and one potential energy term.
Mass C kinetic energy:
T C = 2 1 ( 2 m ) x ˙ C 2
Mass A kinetic energy and potential energy:
x A = x C − ℓ cos θ y A = ℓ sin θ x ˙ A = x ˙ C + ℓ sin θ θ ˙ y ˙ A = ℓ cos θ θ ˙ v A 2 = x ˙ C 2 + 2 ℓ sin θ x ˙ C θ ˙ + ℓ 2 θ ˙ 2 T A = 2 1 m ( x ˙ C 2 + 2 ℓ sin θ x ˙ C θ ˙ + ℓ 2 θ ˙ 2 ) V A = m g y A = m g ℓ sin θ
Mass B kinetic energy:
x B = x C − 2 ℓ cos θ x ˙ B = x ˙ C + 2 ℓ sin θ θ ˙ T B = 2 1 m ( x ˙ C 2 + 4 ℓ sin θ x ˙ C θ ˙ + 4 ℓ 2 sin 2 θ θ ˙ 2 )
Lagrangian:
L = T C + T A + T B − V A = 2 1 ( 2 m ) x ˙ C 2 + 2 1 m ( x ˙ C 2 + 2 ℓ sin θ x ˙ C θ ˙ + ℓ 2 θ ˙ 2 ) + 2 1 m ( x ˙ C 2 + 4 ℓ sin θ x ˙ C θ ˙ + 4 ℓ 2 sin 2 θ θ ˙ 2 ) − m g ℓ sin θ
Equations of motion:
d t d ∂ x ˙ C ∂ L = ∂ x C ∂ L d t d ∂ θ ˙ ∂ L = ∂ θ ∂ L
Evaluating results in:
[ 4 m 3 m ℓ sin θ 3 m ℓ sin θ 4 m ℓ 2 sin 2 θ + m ℓ 2 ] [ x ¨ C θ ¨ ] = [ − 3 m ℓ cos θ θ ˙ 2 − m g ℓ cos θ − 4 m ℓ 2 sin θ cos θ θ ˙ 2 ]
Within a numerical integration program, solve the linear system for the double-dot terms on each time step. The speed of mass A is about 1 . 3 1 1 when θ = 6 0 ∘ .
Simulation code is attached: