Proton in electric and magnetic fields
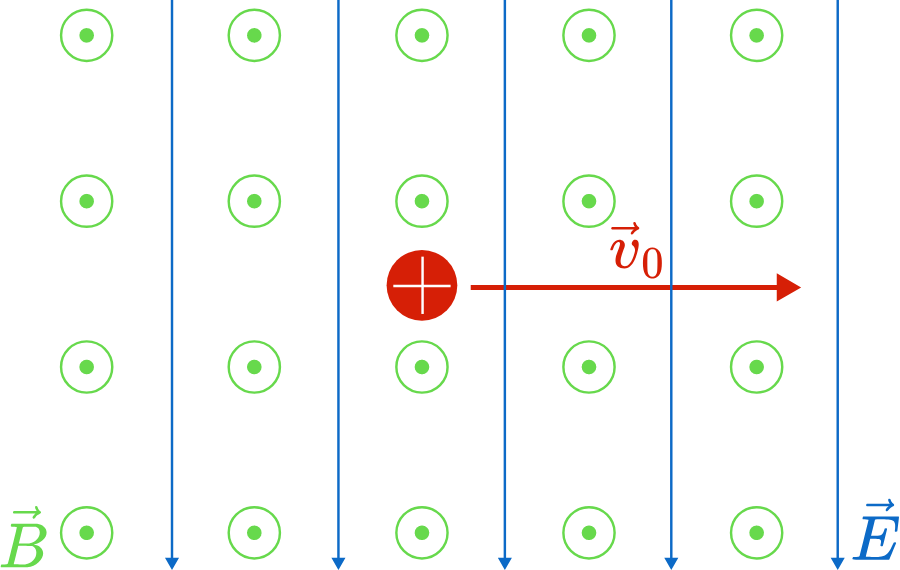
We consider the motion of a positive electric charge (proton) in crossed electric and magnetic fields with the field vectors and . The initial velocity of the proton at time is .
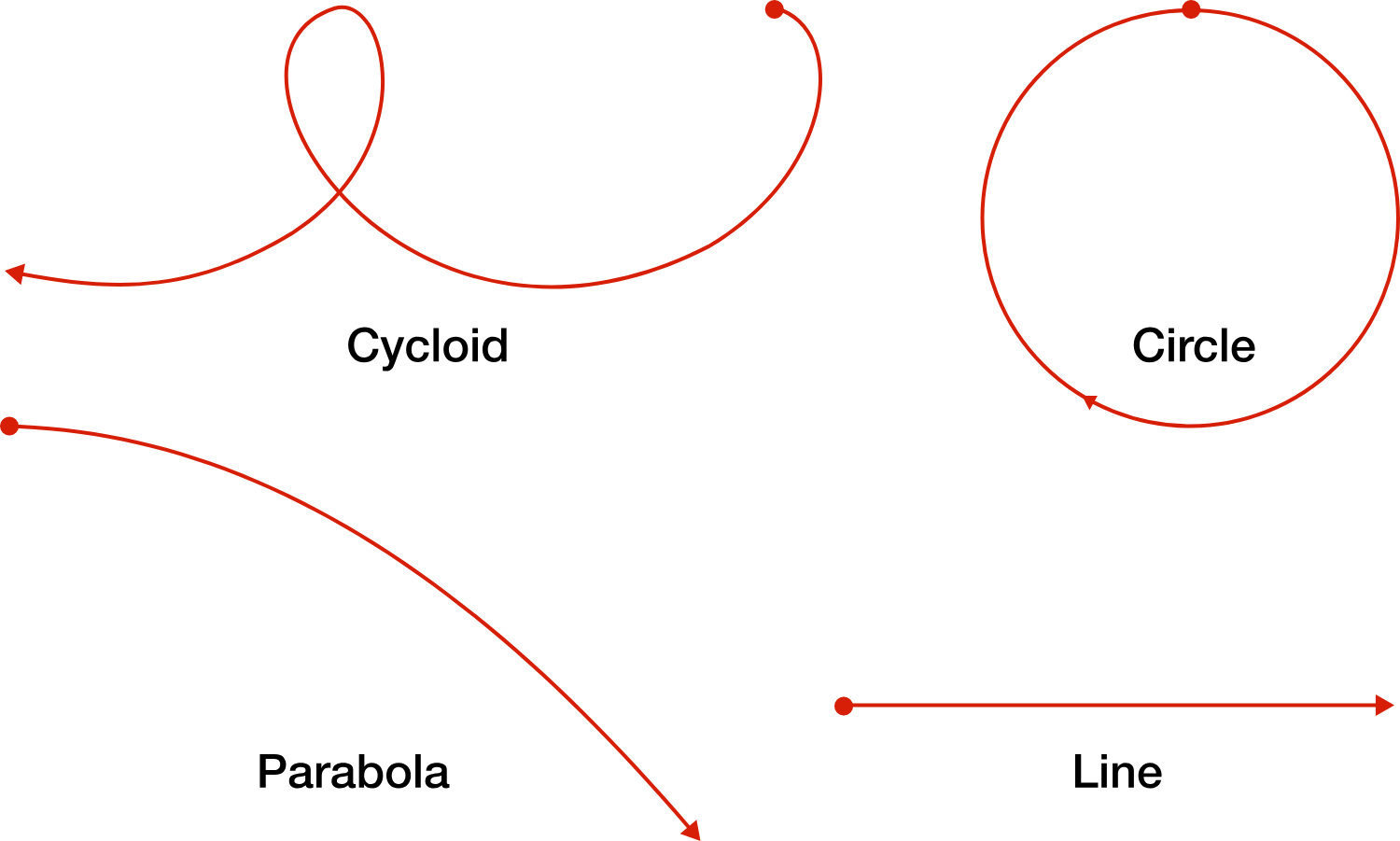
What shape does the trajectory of the proton have if there are no forces other than the Lorentz force?
Note: Pay attention to the directions of the vectors!
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
The proton is accelerated by the Lorentz force F L = e ( E + v × B ) where e is the elementary charge of the proton. For the time t = 0 we have F L = e ( − 1 0 0 0 ⋅ e y + 1 0 5 ⋅ 0 . 0 1 ⋅ ( e x × e z ) ) m V = e ( − 1 0 0 0 ⋅ e y + 1 0 0 0 ⋅ ( − e y ) ) m V ≈ − 3 . 2 ⋅ 1 0 − 1 6 N ⋅ e y The force is non-zero and points perpendicular to the initial direction of motion, so we can exclude the line as a possible solution for the trajectory. In particular, the electric and magnetic forces are exacly equal. Therefore, the circle and the parabola are to be excluded as possible trajectories, since these cases occur only for a purely magnetic field and a purely electric field. In the following, I will show that the solution for the trajectory is indeed a cycloid.
We are now looking for a solution of the differential equation d t d v ( t ) = ( v ˙ x ( t ) v ˙ y ( t ) ) = m 1 F L = m e ( v y ( t ) B − E − v x ( t ) B ) where B = 1 0 mT and E = 1 kV / m are the field amplitudes. The force is zero in the case v = − v 0 = − E / B ⋅ e x , so that this implies an stationary solution v = const . By substitution w = v + v 0 , the equations of motions simplify ( w ˙ x w ˙ y ) = m e B ( w y − w x ) This cases correspond to a movement in a pure magnetic field. The solution of this coupled differential equation with the initial condition w = 2 v 0 is a circular motion with the angular frequency ω = e B / m : ⇒ ⇒ ( w x w y ) ( v x v y ) ( x y ) = ( 2 v 0 cos ( ω t ) 2 v 0 sin ( ω t ) ) = ( − v 0 + 2 v 0 cos ( ω t ) 2 v 0 sin ( ω t ) ) = ∫ 0 t ( v x v y ) d t = ( − v 0 t + ω 2 v 0 sin ( ω t ) − ω 2 v 0 cos ( ω t ) ) + const The resulting trajectory thus represents a superposition of a circular motion and a rectilinear motion. This path corresponds to an elongated cycloid .