Rolling Ball
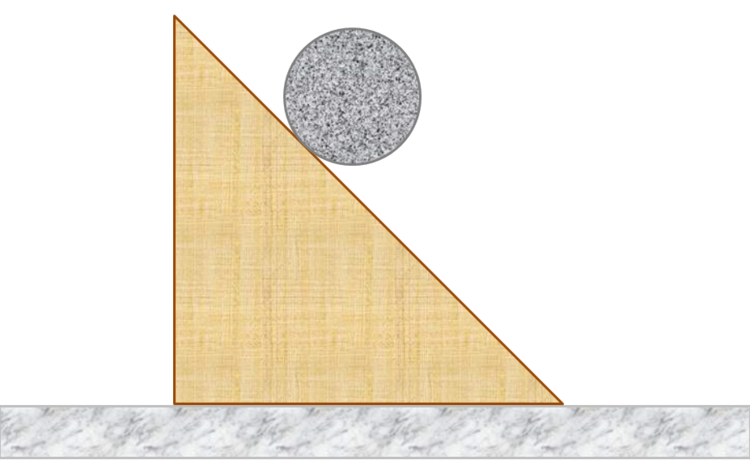 A uniform solid ball of mass
m
rolls without slipping down a wedge of mass
2
m
and angle
4
5
∘
, which itself can slide without friction on a horizontal floor. The acceleration of the ball relative to the wedge can be expressed as
q
p
2
g
, where
g
denotes the gravitational acceleration. Calculate
q
−
p
.
A uniform solid ball of mass
m
rolls without slipping down a wedge of mass
2
m
and angle
4
5
∘
, which itself can slide without friction on a horizontal floor. The acceleration of the ball relative to the wedge can be expressed as
q
p
2
g
, where
g
denotes the gravitational acceleration. Calculate
q
−
p
.
The answer is 22.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
2 solutions
I used newtonian mechanics and got 7 3 2 g . Did anyone else too get the same answer?
This is quite close to 2 5 9 1 1 0 2 g , as it is 2 5 9 1 1 1 2 g
Newtonian mechanics was way simpler. My equations were:
N sin θ = 2 m A
m g cos θ − N = m A sin θ
5 7 m R 2 α = 5 7 m a = ( m A cos θ + m g sin θ ) R
Solving, we get A = 2 + sin 2 θ g sin θ , a = 7 ( 2 + sin 2 θ ) 1 5 g sin θ
Putting θ = 4 5 ∘ , a = 7 3 2 g
Log in to reply
Well, that's interesting. Could you post your solution Jatin? Also include the diagram force vector. Let we check together with other Brilliant members and compare our solution. :)
Log in to reply
Hi, I found a mistake in your solution. You say r ω = v , but r ω = x ˙ . There was a correction in my earlier reply too. I didn't take friction on wedge. Here is the complete solution with the force diagram :
Let a be the relative acceleration and A be acceleration of wedge.

Clearly, a = r α
N sin θ − f cos θ = M A
m g cos θ − N = m A sin θ
m g sin θ − f = m ( a − A cos θ )
f R = 5 2 m r 2 α ⇒ f = 5 2 m a
Solve to get:
a = 7 M + 2 m + 5 m sin 2 θ 5 ( M + m ) g sin θ
In our case, it turns out to be 3 7 1 5 2 g
Log in to reply
@Jatin Yadav – Jatin, you assumed that a = α r . This is only true if the wedge is stationary (in a frame of reference that is inertial), but the wedge is moving and the problem becomes more complicated. BTW, your Newton's equations are not complete yet, there are lots of vectors that are not included there.
Log in to reply
@Tunk-Fey Ariawan – It is true even if wedge is moving . Here is the proof:
The acceleration of contact point = A + a + − r α a ^ . This velocity is same as velocity of wedge as there is no slipping at contact point. Hence, A + a + − r α a ^ = A ⇒ r α a ^ = a a ^ ⇒ r α = a . I am quite sure this equation is correct. Also, please tell how the equations are incomplete.
Log in to reply
@Jatin Yadav – Same here. I did it with exactly the same method.
@Jatin Yadav – Ahh, I've just see your comment. Jatin, I'm quite sure that ω r = v not ω r = x ˙ . So far, I can assure you that this solution is correct. If I found a mistake, you'll be the first to know it. Anyway, right now I can't check all your comment nor your approach because I'll be busy for the next few weeks. There are middle exams in my college and I've to focus there. See you... :)
Log in to reply
@Tunk-Fey Ariawan – Tunk-Fey Ariawan ; please go through your method once again. Most of us here are getting answer as 22.
@Jatin Yadav – Yes 15/37 right. I got the same answer. Can Anyone explain Whose is correct?
@Jatin Yadav – i also got the same equation and exactly the same answer
@Jatin Yadav – The equations are alright. But, I am getting 32 as answer..maybe error in calculation.
@Jatin Yadav – exactly this what i got..
@Jatin Yadav – this is what i have got
but from first and second we get m g c o s θ = 3 m A s i n θ , then m A c o s θ = m g t a n θ ∗ c o s θ solving these two I got different answer ..can anybody help in finding error?
Log in to reply
How did you get m A cos θ = m g tan θ cos θ ?
I think the miscalculation is in a . In your calculation, a is relative to what? Remember, the wedge also moves so you must threat a differently.
Hi Jatin!
I also get the same answer but I did not get the same equations as you. The equation you write: N sin θ = 2 m A , why would you disregard the frictional force acting on wedge? Don't you think the equation should be N sin θ − f cos θ = 2 m A ?
Log in to reply
By the way, how did you get the same answer, the answer should be 3 7 1 5 2 g . Check the reply I made to Tunk-Fey, just before you made this reply.
Log in to reply
@Jatin Yadav – I got the same answer. The answer should be 22.
@Jatin Yadav – I got 3 7 1 5 2 g in my first try at the problem but since this was marked incorrect, I tried something which gave me 7 3 2 g . I was confused about the pure rolling condition so I tried a = α R + A cos θ and this gave me the same answer as you but I guess this is utterly wrong. :P
And btw, congratulations for securing the first position in Proofathon Trig contest. :)
@Jatin Yadav – I'm also getting this same answer
Jatin you didnt consider the friction force on the wedge.
I think there is a mistake in the rolling kinetic energy term in the Lagrangian. This is my solution: I will use Newtonian first, then to assure it I'll check it with Lagrangian
Let X be the position of the lower right of the wedge and s be the position of the ball along and relative to the bottom of the wedge, x and y are the horizontal and vertical position of the ball with respect to the ground
Take positive x to the right direction and positive y to the "downward" direction
I will choose the origin to be at the right of the wedge
We can write Newton's second law in the coordinate whose its x-axis is parallel to the wedge: Σ F = m x ¨
m g s i n α − f = m ( s ¨ + X ¨ c o s α ) ...(1)
Newton's law for rotational motion is Σ τ = I θ ¨ the non-slipping condition is θ ¨ R = s ¨ , this is true because s is the position of center mass of the ball relative to the wedge
taking 5 2 m R 2 as the moment inertia of the solid ball, one would obtain
f = 5 2 m s ¨ ... (2)
substitute eq (2) to (1)
g s i n α = 5 7 s ¨ + X ¨ c o s α ... (*)
The position of the center mass of the ball-wedge system is given by
− x c m = ( M + m ) m ( X + s c o s α ) + M ( X + C ) where C is constant
there are only internal forces acting on the system so the center mass doesn't move, i.e. X ¨ c m = 0 differentiate this expression for center mass two times w.r.t. time, one can obtain
( M + m ) X ¨ + m s ¨ c o s α = 0 ... (3)
we have two equations (* and 3) with two unknowns ( X ¨ and s ¨ ), eliminate X ¨ to obtain s ¨ = 5 7 ( 1 + m M ) − c o s 2 α g ( 1 + m M ) s i n α
for M = 2 m and α = 4 5 ∘ as stated in the problem,
s ¨ = 3 7 1 5 2 g
One can also obtain this result by Lagrange's Method
the location of the center of the ball is
x = − X − s c o s α + R s i n α
y = − ( s s i n α + R c o s α )
if the ball rotates through an angle θ , non-sliping condition gives us θ ˙ R = s ˙ , thus the Lagrangian is
L = T − V
L = 2 1 M X ˙ 2 + 2 1 m ( x ˙ 2 + y ˙ 2 ) + 2 1 I θ ˙ 2 − m g y
L = 1 0 7 m s ˙ 2 + 2 1 ( M + m ) X ˙ 2 + m c o s α X ˙ s ˙ + m g s s i n α + m g R c o s α
Lagrange’s equation with respect to generalized coordinate s is therefore
d t d ( ∂ s ˙ ∂ L ) = ∂ s ∂ L
Put the Lagrangian into the equation yields
5 7 s ¨ + X ¨ c o s α = g s i n α
In agreement with (*)
We can apply “conservation of center mass” as before and obtain exactly the same result
According to the problem we can write s ¨ = q p 2 g
And we found that s ¨ = 3 7 1 5 2 g
p = 1 5 , q = 3 7 . So q − p = 3 7 − 1 5 = 2 2
The answer should be 22
Oh my God, will I even learn this when I'm 20?
Log in to reply
I am 23 , completed my B. tech in ECE and now back to what i loved to , still some of the problems are way out of my reach. It's just the amount of practice , and a really solid base of concepts , don't worry you have a lot of time :)
i got 5/12 V2g. can you prove it with newton law to mr Tunk-Fey?
Log in to reply
Males bro!? Nggak sempet, tugas kuliah banyak, ada UTS juga. Kamu cek aja terus postingan ini, suatu saat nanti pasti ada yg buat solusinya pake cara Newton. :)
Log in to reply
Siap lah, ngomong2 hobi kita sama. Cuman hobi ku satu itu ga boleh di share sama bapa. Aku pake gas. Gak nyangka aja ada yang sepinter ka Tunk Fey hoby nya begituan.
Please refer to following links.
my answer for this problem is 22.
For constraint problems and moving wedges, Newtonian mechanics is a nightmare. Even though I used Lagrangian mechanics, it took me three tries.
I got 3 8 1 5 ( R o o t 2 ) g I don't know why it is wrong... Here is my solution... m g cos θ − 2 ( N cos θ − f r i c t i o n sin θ ) sin θ = N I plugged the value of N obtained in the above equation in THIS equation- ( N cos θ − 5 2 m a sin θ ) sin θ + m g sin θ − 5 2 m a = m a Here, ( N cos θ − 5 2 m a sin θ ) sin θ + m g sin θ is the actual force acting on the ball in the direction of m g sin θ . Actually, what I did was this. I thought that the wedge would accelerate away due to 2 forces... 1) the sin45 component of Normal 2) -sin45 component of the friction. The resultant of these two accelerate away the wedge, hence the ball will feel a negative acceleration if we imagine the wedge to be stationary. The sin45 component of this pseudo acceleration of the ball will cause the downward acceleration of the ball to increase with respect to the wedge.
I think its 22, I dont understand lagrangian mechanics but with Newtonian mechanics I think we get 22.
I too got 15/37 by using Newton's laws aswell as by Lagrangian method....answer should be 22
i too got 15/37*(sqrt{2})g.......by using Newtons laws aswell as by lagrangian method...the correct answer is 22 .
V can actually simplify de eqns by conserving momentum in horizontal direction ie equating acceleration of com to 0 in x direction .....5 eqns will reduce to 2 or 3....#
Please change the answer as 22 should be the correct answer.
Because v is the magnitude of the velocity of the ball with respect to the ground, and it rolls without slipping with respect to the wedge , the correct relation is y ˙ = ω r .
There are several ways of doing the problem correctly, e.g., Newtonian mechanics with non-inertial frames, conservation of energy, or Lagrange equations, all yielding (obviously) the same correct answer 2 2 . I will show the correct use of Lagrange's equation with his generalized coordinates x and y .
T b a l l = 2 1 m [ ( x ˙ + y ˙ cos θ ) 2 + ( y ˙ sin θ ) ] 2 + 2 1 I ω 2 = 2 1 m ( x ˙ 2 + y ˙ 2 + 2 x ˙ y ˙ cos θ ) + 5 1 m y ˙ 2 T w e d g e = 2 1 M x ˙ 2 T = T b a l l + T w e d g e V = − m g y sin θ Lagrange equation for x and y are M x ¨ + m x ¨ + m y ¨ cos θ = 0 y ¨ + x ¨ cos θ + 5 2 y ¨ − g sin θ = 0 Subsituting x ¨ from the first equation and simplifying yields y ¨ = 7 ( m + M ) − 5 cos 2 θ 5 ( m + M ) sin θ g Using M = 2 m and θ = 4 5 ∘ , we find y ¨ = 3 7 1 5 2 g So, p = 1 5 , q = 3 7 ⟹ q − p = 2 2
Can you upload a solution using Newtonian Mechanic?
I use Lagrangian mechanics method to answer this problem because I think it is easier than Newtonian mechanics. Let T be the kinetic energy, V be the potential energy then the Lagrangian L is given by L = T − V and the Lagrangian equation is d t d ( ∂ q ˙ k ∂ L ) − ∂ q k ∂ L = 0 , where it is assumed that V is not a function of the velocities, i.e. ∂ q ˙ k ∂ v = 0 . The symbol q is a generalized coordinate used to represent an arbitrary coordinate x , y , θ , etc and the 'dot' sign above q means derivative with respect to time, q ˙ = d t d q .
Let M denote the wedge mass and r denote the radius of the ball. Since the ball is uniform solid then its moment of inertia is I = 5 2 m r 2 . Components of the velocity of the ball are v x v y v 2 = x ˙ + y ˙ cos θ , = y ˙ sin θ , = v x 2 + v y 2 = x ˙ 2 + y ˙ 2 + 2 x ˙ y ˙ cos θ . The kinetic energies: T b a l l T w e d g e T s y s t e m = 2 1 m v 2 + 2 1 I ω 2 = 2 1 m v 2 + 2 1 ⋅ 5 2 m r 2 ω 2 = 2 1 m v 2 + 5 1 m v 2 = 1 0 7 m v 2 . = 1 0 7 m ( x ˙ 2 + y ˙ 2 + 2 x ˙ y ˙ cos θ ) = 2 1 ( M + m ) x ˙ 2 . = T b a l l + T w e d g e = 1 0 7 m ( x ˙ 2 + y ˙ 2 + 2 x ˙ y ˙ cos θ ) + 2 1 ( M + m ) x ˙ 2 . The potential energy: V s y s t e m = V b a l l = − m g y sin θ . The Lagrangian is L = T s y s t e m − V s y s t e m = 1 0 7 m ( x ˙ 2 + y ˙ 2 + 2 x ˙ y ˙ cos θ ) + 2 1 ( M + m ) x ˙ 2 + m g y sin θ . The Lagrange’s equations are d t d ( d x ˙ d L ) − ∂ x ∂ L = 0 and d t d ( d y ˙ d L ) − ∂ y ∂ L = 0 . After substituting the Lagrangian L to the Lagrange’s equations, yield these two equations: 5 7 m x ¨ + 5 7 m y ¨ cos θ + ( M + m ) x ¨ = 0 and 5 7 m y ¨ + 5 7 m x ¨ cos θ − m g sin θ = 0 . Solving and simplifying the last two equations yield x ¨ = − ( 5 M + ( 5 + 7 sin 2 θ ) m ) 5 m g sin θ cos θ and y ¨ = 7 ( 5 M + ( 5 + 7 sin 2 θ ) m ) 5 ( 5 M + 1 2 m ) g sin θ , where x ¨ is the acceleration of the wedge and y ¨ is the acceleration of the ball. Therefore, for M = 2 m and θ = 4 5 ∘ , the acceleration of the ball is y ¨ = 7 ( 5 ( 2 m ) + ( 5 + 7 sin 2 4 5 ∘ ) m ) 5 ( 5 ( 2 m ) + 1 2 m ) g sin 4 5 ∘ = 7 ( 1 0 + 5 + 2 7 ) 5 ( 2 2 ) ⋅ 2 1 2 g = 2 5 9 1 1 0 2 g . Thus, q − p = 2 5 9 − 1 1 0 = 1 4 9 .
# Q . E . D . #