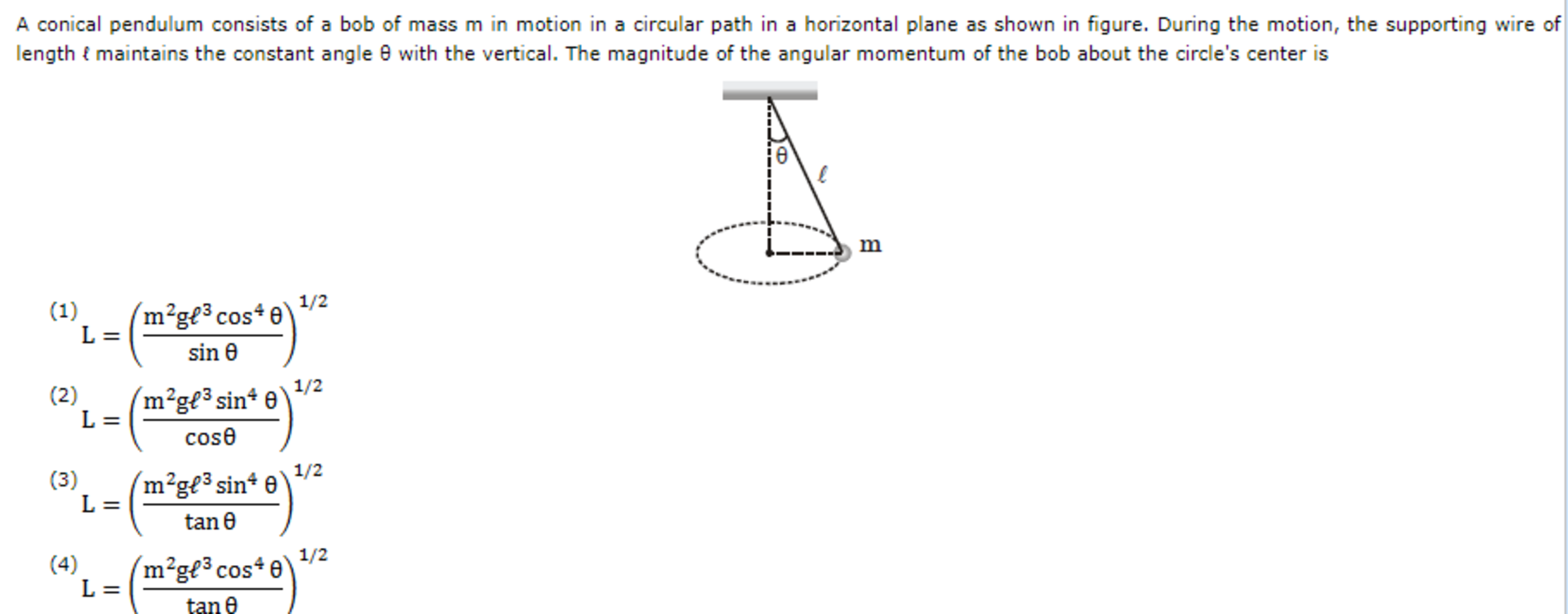
Rotational Mechanics#0
 NOte- Enter the correct option number as the answer
NOte- Enter the correct option number as the answer
The answer is 2.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
1 solution
Just solved this problem. Here is my approach.
The position vector of the bob is:
r = ⎣ ⎡ L sin θ cos ϕ L sin θ sin ϕ − L cos θ ⎦ ⎤
Linear momentum is:
p = ⎣ ⎡ − m L ϕ ˙ sin θ sin ϕ m L ϕ ˙ sin θ cos ϕ 0 ⎦ ⎤
Here θ is constant.
Now, according to the force balance:
T sin θ = m ϕ ˙ 2 L sin θ T cos θ = m g
⟹ L sin θ g tan θ = ϕ ˙ 2
The vectors r and p are perpendicular to each other. Therefore, the magnitude of the angular momentum is:
∣ r × p ∣ = ∣ r ∣ ∣ p ∣ sin ( 2 π ) ∣ r × p ∣ = L ( m L sin θ ϕ ˙ ) sin ( 2 π ) ∣ r × p ∣ = m L 2 sin θ L sin θ g tan θ ∣ r × p ∣ = m 2 L 4 sin 2 θ ( L sin θ g tan θ ) ∣ r × p ∣ = cos θ m 2 g L 3 sin 2 θ
I cannot find my mistake here. Any comments would be helpful.
Log in to reply
@Steven Chase What are your thoughts on this?
Log in to reply
For the angular momentum calculation, we want r to be defined with respect to the center of the circle of rotation, rather than with respect to the origin. The difference is a factor of sin θ , which I think is why your answer is off by just a factor of sin 2 θ under the radical.
Log in to reply
@Steven Chase – Yes, I was calculating the angular momentum about the point of suspension. I did not read the question completely. Now my answer is the same as yours. Thank you for the feedback.
Balance equations:
T c o s θ = m g T s i n θ = l s i n θ m v 2
Re-arranging:
c o s θ g s i n θ = l s i n θ v 2 v = c o s θ g l s i n 2 θ
Angular momentum:
L = r m v = l s i n θ m c o s θ g l s i n 2 θ = c o s θ m 2 g l 3 s i n 4 θ