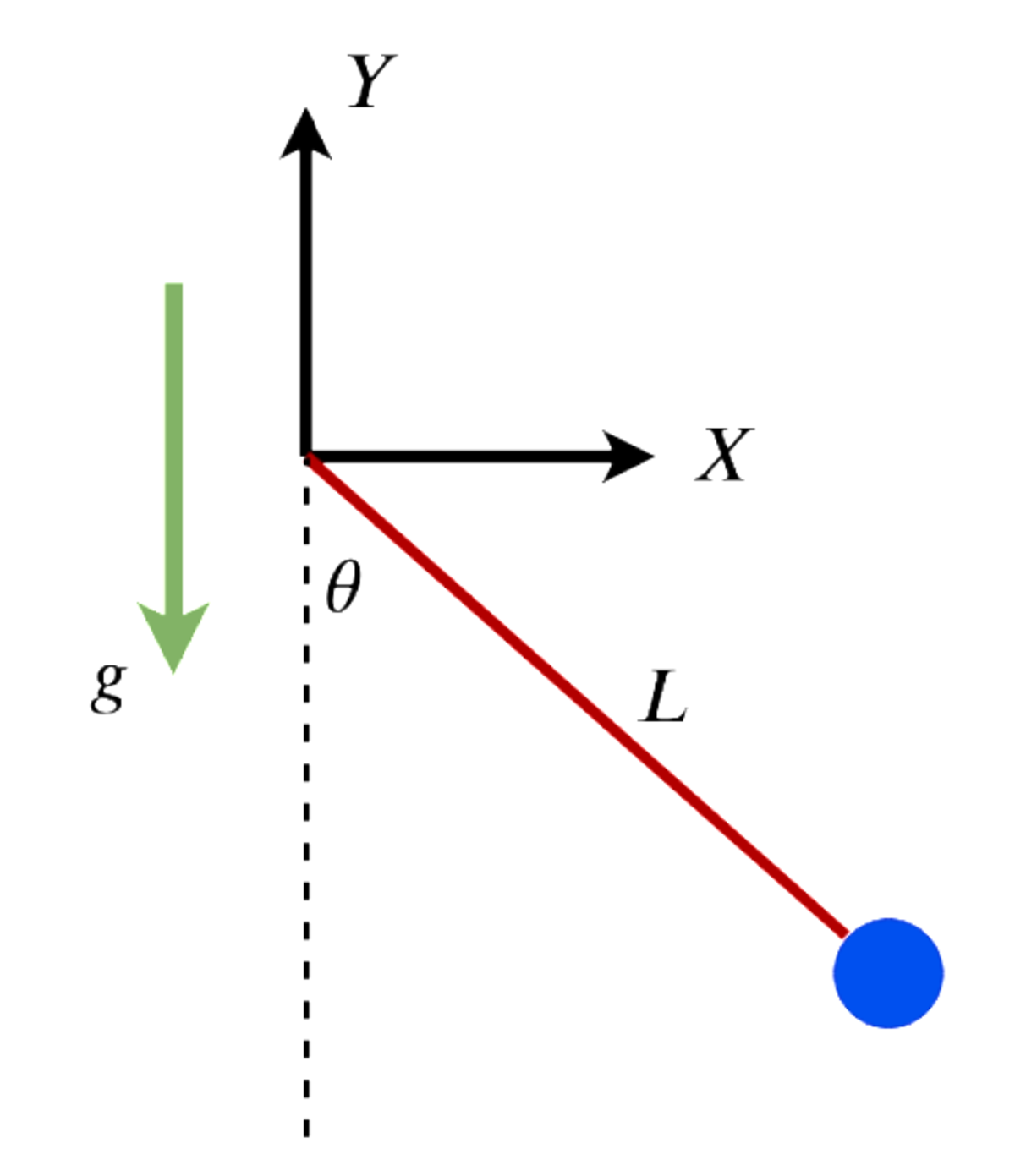
Simple Pendulum - Length Estimation
In mechanics, a solver is usually presented with a description of a physical system and is expected to analyse it using first principles and assess how well the results correlate with experiments. A frequent assumption is made which is that the parameters of the system are known accurately. However, in reality, this may not be the case. It then becomes useful to estimate the parameters of a system using given measurements (obtained from experiments) following which further analysis can be carried out.
Example: To analyse using mechanics, with a fair degree of accuracy, how the movement of a car evolves with time, its mass is required to be estimated. With fuel being consumed at time-varying rates and passengers' masses and their distributions within the vehicle being unpredictable, this task is far from trivial.
In this problem, the solver is provided with a set of 'very accurate measurements' of a simple pendulum's angular position vs. time. The length of the pendulum is unknown. The task at hand is to estimate the length of this pendulum using this given information. The data of angle vs. time can be found in this Pastebin link.
Take .
Initial conditions: , . Ignore dissipative forces. Treat the bob as a point mass.
There is more than one way to solve this problem. One may use pure brute force or a more sophisticated technique. I look forward to seeing your solutions.
The answer is 3.1416.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
These "raw data" problems are always fun. The dynamics of the pendulum are:
θ ¨ = L − g sin θ
Re-arranging into a more useful form gives:
L = θ ¨ − g sin θ
We are given the ( t , θ ) data in column form. What remains is the following:
1) Use difference quotients and the data from Columns 1 and 2 to derive θ ˙ in Column 3
2) Use difference quotients and the data from Columns 1 and 3 to derive θ ¨ in Column 4
3) Calculate the sine of θ in Column 5
4) Calculate the estimated value for L in Column 6
The estimate isn't very good, since the time step is quite large. Ordinarily, we would want to look at time steps two or three orders of magnitude smaller than this. But it is reasonable to guess from the estimated values that the true value is π .