Solve for trajectory again
 We have placed a particle of mass
m
at
r
→
=
r
0
i
^
.
We have placed a particle of mass
m
at
r
→
=
r
0
i
^
.
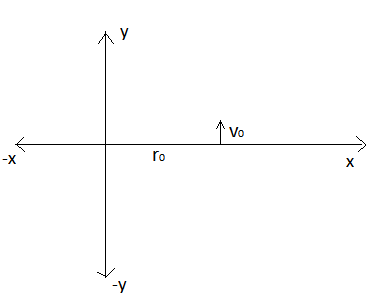
At t = 0 we have given it a velocity of v = v 0 j ^ .In the whole co-ordinate plane the force is given by F = − r N e w t o n
The title says solve for trajectory but I am telling you that the trajectory of the particle is ellipse.If the eccentricity of the ellipse is given by e = b a where a , b are co-prime integers and a is square free then find a × b
Details and Assumptions
1) v 0 = 2 m / s , r 0 = 1 m e t r e , m = 1 K g
2)There are no other force acting on the particle except the force given.
3) Ignore gravity
The answer is 6.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
4 solutions
@Ronak Agarwal any flaw in my solution?
Log in to reply
Perfect solution.
Log in to reply
btw you post some reeeeeaaaalllyyy great problems man! :D
Yeah Simple but Nice Question !
Perfect solution!!! Thanks for being patient and explaining everything!!:)
Log in to reply
thanks.. well people need the explanation so that they can understand it thoroughly and thus it would help them to solve problems in future :D
The resulting motion can be thought of as two separate simple harmonic motions one along each axis because of the given form for the force. First consider a motion along X-axis. The maximum amplitude along this axis is b = r 0 because at that point the component of velocity along x-axis is zero. To calculate the amplitude of motion along Y-axis, let us use energy conservation. The kinetic energy for y = 0 is 2 1 m v 0 2 . The potential energy when particle is at the extreme point on Y-axis (say y = a ) is 2 a 2 . Hence we have, b 2 = m v 0 2 Thus, the eccentricity of the ellipse is given by: e = 1 − b 2 a 2 = 1 − m v 0 2 r 0 2 Substituting the given values, we get, e = 2 3
exactly! did the same but by using force equations!!
Really nice solution. But don't you have to first prove that the given force field is conservative before applying CoE?
Interestingly, this forms a sort of attracting field, with the the force field pulling the object towards the plane's centre.
This forms a symmetric ellipse, about the y and x-axes. Here's an image I made by simulating the trajectory:
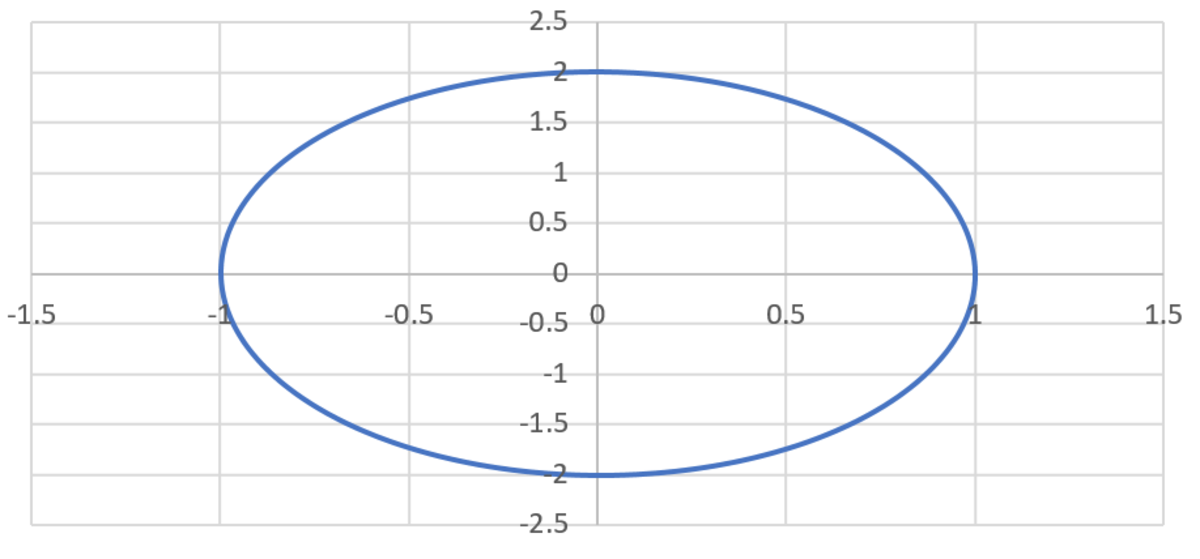
Here is the simulation:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
|
first we know that d l / d t = r ∗ F when force is along the r. net torque about that point is zero.
this implies angular momentum is conserved * m v ∗ r = c o n s t a n t *
let the path followed be * \frac{x^(2)}{a^(2)}\+\frac{y^(2)}{b^(2)}\=1 *
so we look at 2 position
x=a(2(initial velocity),a(magnitude of position vector))
and x=0(v,b)
v b = 2
now we find radius of curvature at x=0
we found it to be R= \(\frac{a^(2)}{b} )
* R m v ( 2 ) =b*
hence b = 2
I will first prove that the trajectory will be of an ellipse:
1 Considering the motion along X:
since mass is 1 , the falue of F = d x 2 d 2 x
note that d x 2 d 2 x = v d x d v
now: v d x d v = − x
thus, by simple integration, we get 2 v 2 + 2 x 2 = c 1
now, at t = 0 ; v = 0 ; x = 1 so, putting values and calculating, we get c 1 = 2 1
so, the equation can be re-written as:
v = 1 − x 2
and by re-arranging and putting integrals:
∫ 1 − x 2 d x = ∫ d t
A gen solution of this is x = s i n ( t + c 2 ) (for proof of this look at the end)
Now, at t = 0 , x = 1 ..Giving c 2 = 2 π
so, we get the gen equation for x = c o s t
2 Considering Y-axis
note that acceleration and displacement will have the same type of relation like X.
solve them the same way to get:
v 2 = 2 c 3 − y 2
at t = 0 , v = 2 , y = 0
Solve and simplify to get:
∫ 4 − y 2 d y = ∫ d t
again, a general solution to this is
y = 2 s i n ( t + c 4 )
again, at t = 0 , y = 0 giving c 4 = 0
Thus, gen equation for Y:
y = 2 s i n t
3 The Ellipse Part:
the parametric equation of an ellipse is : ( a cos θ , b sin θ ) where eccentricity = e = 1 − b 2 a 2
in this case, a = 1 , b = 2
put values to get e = 2 3
Thus, our answer: 6
proof of ∫ a 2 − x 2 d x = ∫ d t gives x = a s i n ( t + k ) where k is the constant of integration
Let y = s i n − 1 ( a x )
or, a x = s i n y
differentiating w.r.t x and re-arranging, we get:
d x d y = a c o s y 1 = a 2 − a 2 s i n 2 y 1
putting values of s i n y and simplifying, we get:
d y = a 2 − x 2 d x
therefore, ∫ a 2 − x 2 d x = ∫ d y = y = s i n − 1 ( a x )
the rest is followed