Unequal rods Oscillations
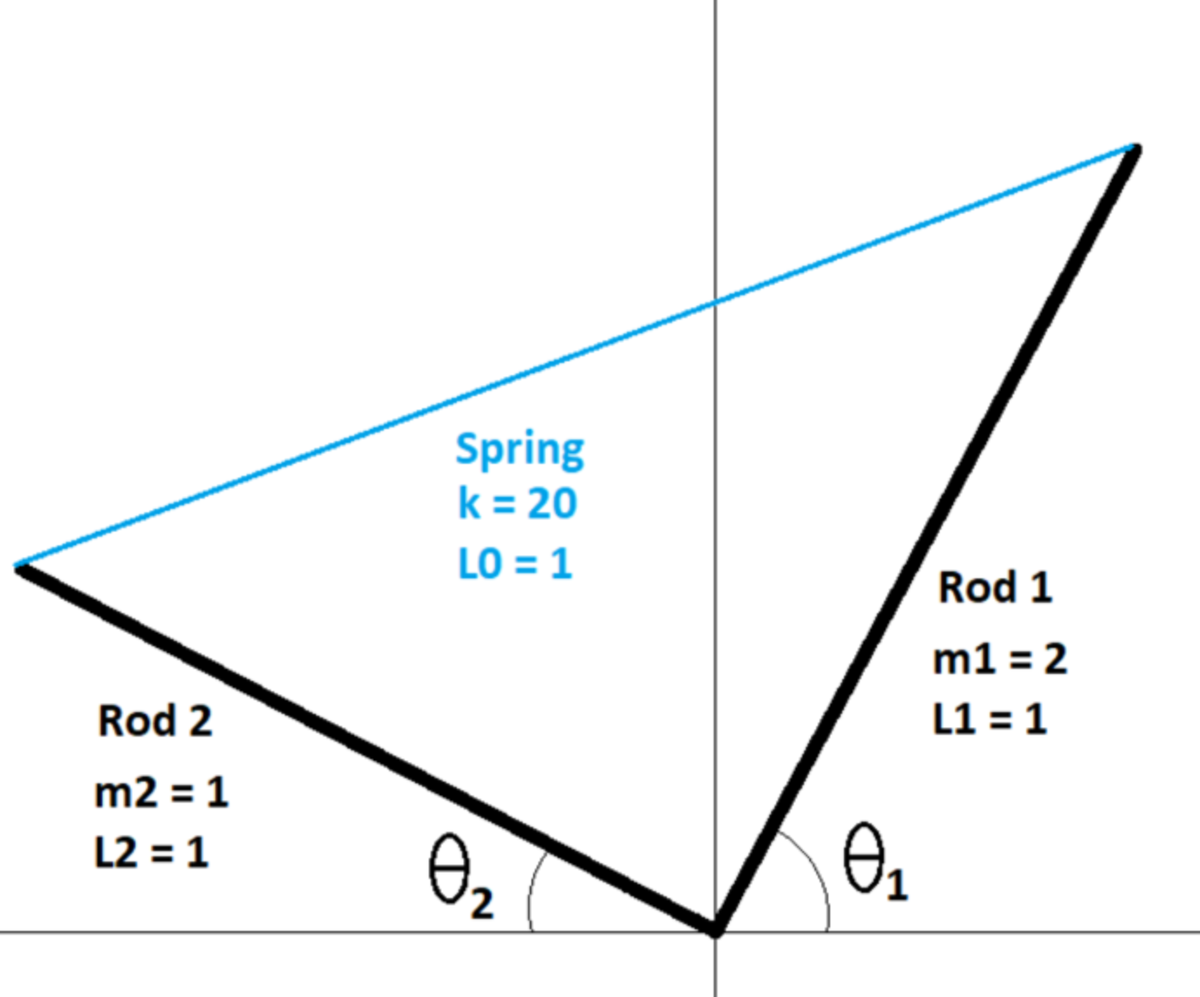
Two uniform rods are hinged about the origin. Each rod can rotate about the Z axis independently of the other (the axis being perpendicular to the page). The other ends of both rods are connected by a spring. The diagram shows the masses and lengths of both rods, the force constant and natural length of the spring. Gravity is absent in this scenario.
The system is released from rest when θ 1 = 6 6 o and θ 2 = 3 5 o . Find the following quantity A when θ 1 = 7 5 . 0 1 1 5 o and θ 2 = 5 3 . 0 2 2 9 o .
A = 2 ( θ ˙ 1 + θ ˙ 2 ) 2
In the quantity A , the angular velocities are in rad/s and are both positive numbers.
Suggestion: Attempt to obtain an exact solution.
More versions of this problem will follow soon.
The answer is 2.6435.
This section requires Javascript.
You are seeing this because something didn't load right. We suggest you, (a) try
refreshing the page, (b) enabling javascript if it is disabled on your browser and,
finally, (c)
loading the
non-javascript version of this page
. We're sorry about the hassle.
3 solutions
Thank you for the solution. Very insightful!
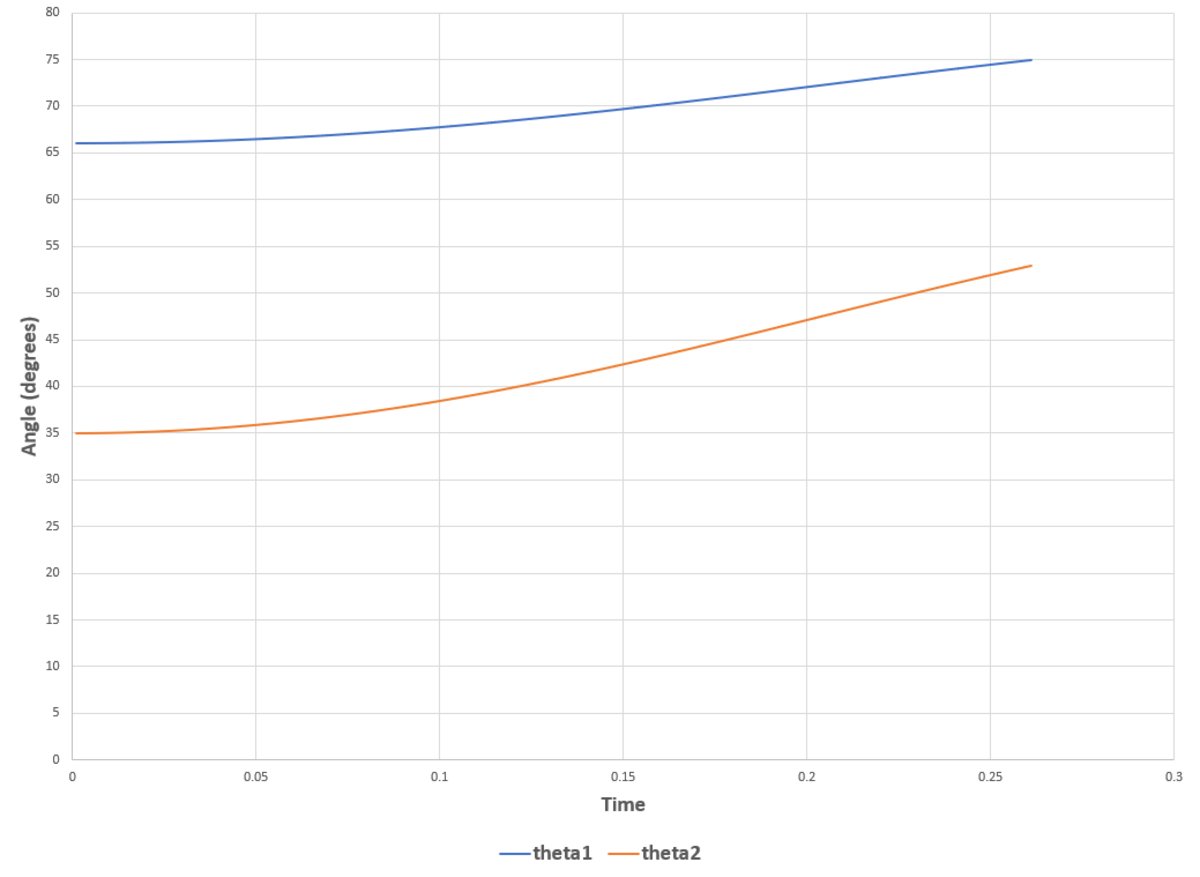
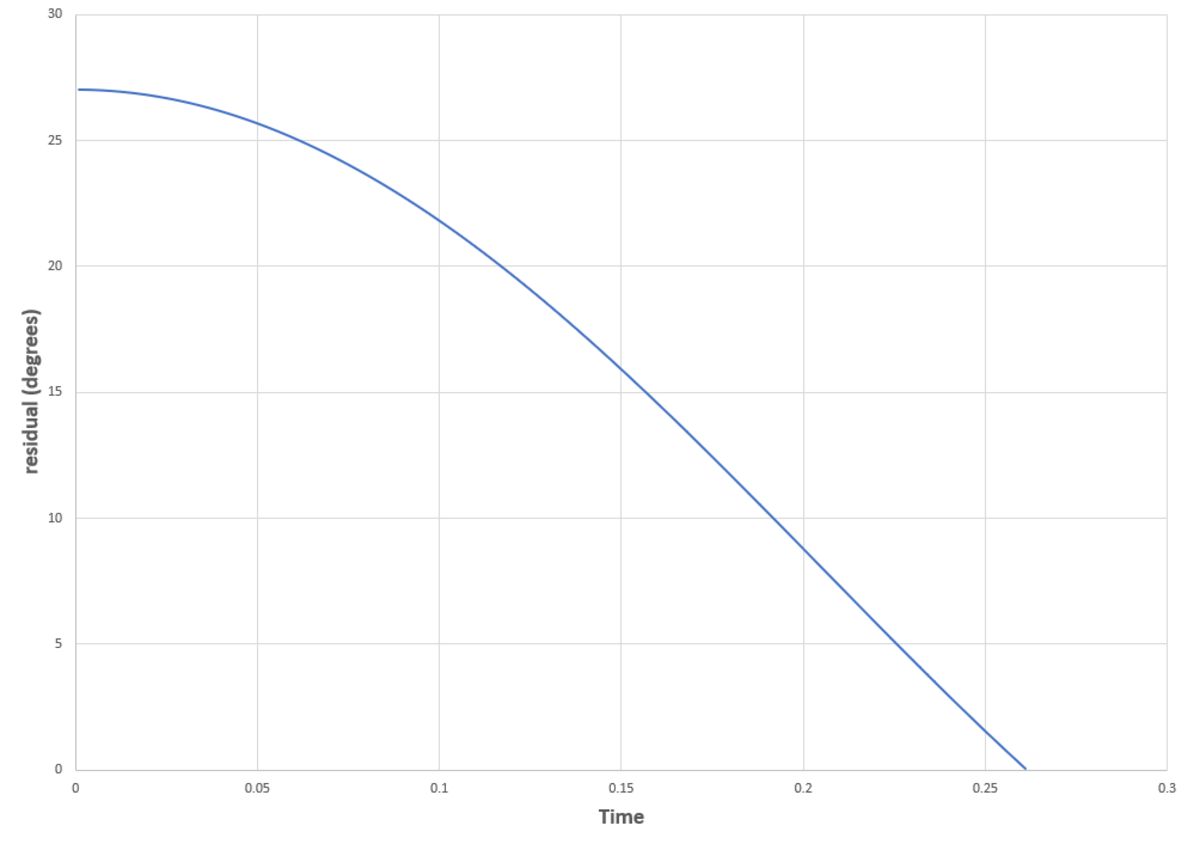
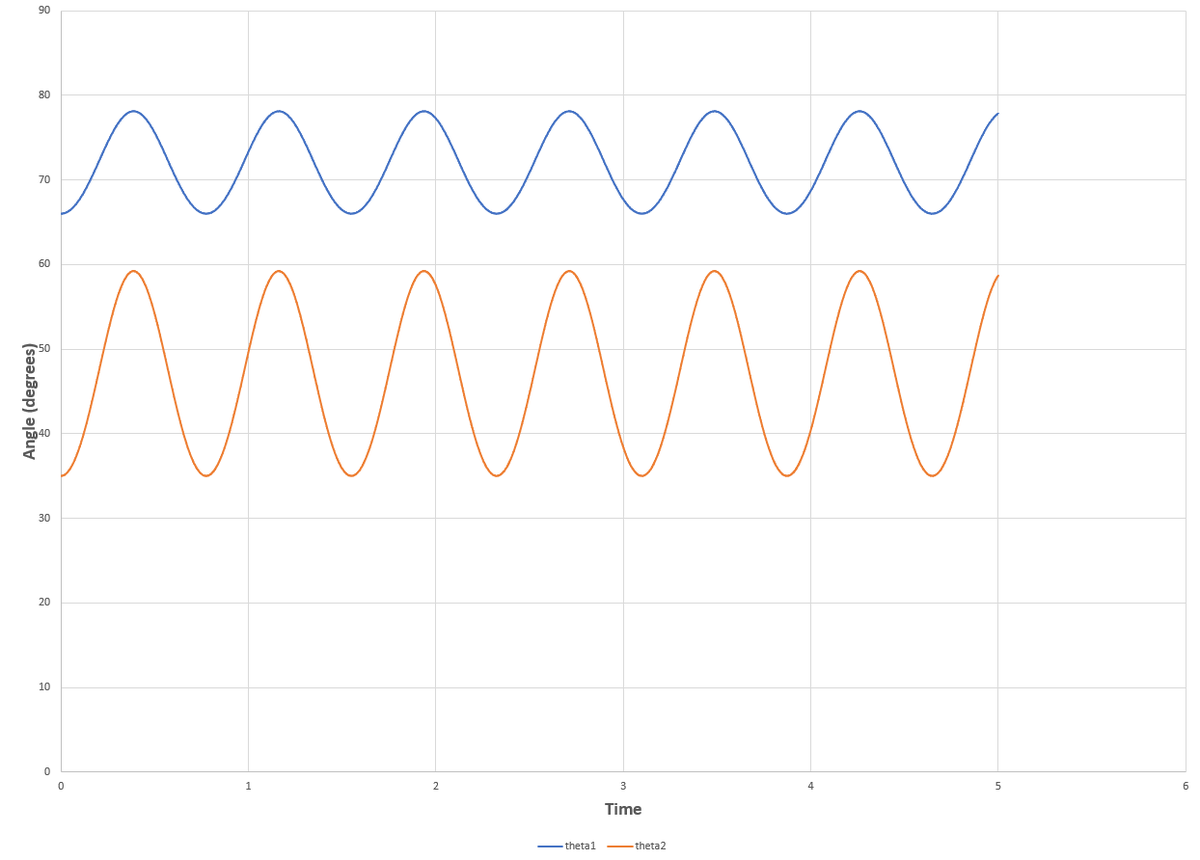
Admittedly, I did not solve analytically. I modified the code from the original problem to solve numerically for the time dynamics. The simulation runs until the "residual" becomes zero. The residual is calculated as ∣ θ 1 − θ 1 f ∣ + ∣ θ 2 − θ 2 f ∣ , where θ 1 f and θ 2 f are the given angles at which to evaluate the A quantity. The most challenging thing about this problem for me was keeping the conventions straight. The code actually references both angles to the positive x axis. With that reference θ ˙ 2 is negative at the end, but with respect to the negative x axis, θ ˙ 2 is positive. I used up two tries just on convention errors before straightening everything out. Below are plots of the angles over time (as referenced in the diagram), and of the residual (in degrees) over time. You can see that both angles increase, meaning that the rods are pulling together. Running the simulation for longer (third plot) shows sinusoidal oscillations in the angles, which have the same frequency and the same phase, but different magnitudes.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 |
|
Thanks for the solution. I will specify in the problem that the angular velocities should be positive numbers. This will eliminate any confusion in sign conventions.
Log in to reply
I think the wording of the problem is fine. I just had things mixed up in my own implementation. Nice followup problem
Log in to reply
@Steven Chase Sir please upload a question to find the gravitational binding energy of hollow hemisphere.
I have posted an analytical solution to this problem. Hope it is explained clearly.
An analytical approach is as follows. Usually, problems like these cannot be solved analytically. However, in this case, we are lucky to see some structure in the equations of motion which can be exploited.
Notice how the spring and the two rods form a triangle. More specifically, an isosceles triangle. This is because of the rods having an equal length. From here, two equations can be formed by calculating the torque about the origin.
The angle between either rod and the spring is:
ϕ = 2 θ 1 + θ 2
The above result follows from elementary geometry. Now the torque experienced by rod 1 about the origin is:
T 1 = F s L 1 sin ϕ = I 1 θ ¨ 1
The torque experienced by rod 2 about the origin is:
T 2 = F s L 2 sin ϕ = I 2 θ ¨ 1
Here,
F s = K ( ( cos θ 1 + cos θ 2 ) 2 + ( sin θ 2 − sin θ 1 ) 2 − 1 ) I 1 = 3 1 m 1 L 1 2 I 2 = 3 1 m 2 L 2 2
Now, by simplifying the two equations of motion by using trigonometric identities (steps omitted), we get:
θ ¨ 1 = cos ( θ 1 + θ 2 ) + 1 1 5 2 sin ( θ 1 + θ 2 ) ( 2 cos ( θ 1 + θ 2 ) + 1 − 1 )
θ ¨ 2 = cos ( θ 1 + θ 2 ) + 1 3 0 2 sin ( θ 1 + θ 2 ) ( 2 cos ( θ 1 + θ 2 ) + 1 − 1 )
Adding the two equations above gives:
θ ¨ 1 + θ ¨ 2 = cos ( θ 1 + θ 2 ) + 1 4 5 2 sin ( θ 1 + θ 2 ) ( 2 cos ( θ 1 + θ 2 ) + 1 − 1 )
Let θ 1 + θ 2 = z . Then, by substituting this expression in the above result gives:
z ¨ = cos ( z ) + 1 4 5 2 sin ( z ) ( 2 cos ( z ) + 1 − 1 )
This can be rewritten as:
z ˙ d z d z ˙ = f ( z ) = cos ( z ) + 1 4 5 2 sin ( z ) ( 2 cos ( z ) + 1 − 1 )
Separating the variables, applying initial conditions and integrating gives:
2 z ˙ 2 = 2 ( θ 1 ˙ + θ 2 ˙ ) 2 = ∫ a b f ( z ) d z
Where a = 1 8 0 π ( 6 6 + 3 5 ) and b = 1 8 0 π ( 7 5 . 0 1 1 5 + 5 3 . 0 2 2 9 )
The integral has a closed-form expression but the calculations are a bit tedious given the weird limits of integration. I have left out the steps to solve this integral. The last step was done using a calculator giving the answer of:
A = 2 ( θ 1 ˙ + θ 2 ˙ ) 2 ≈ 2 . 6 4 3 5
Although I have left out a few steps, I will elaborate further if requested.
Interesting. I would not have guessed that an analytical approach would be possible. But in hindsight, the results appear to simply be offset sinusoids. So that is a clue.
Log in to reply
Ya this one of those unusual situations where it is possible. However, with the introduction of gravity, an analytical approach is unthinkable. I will post a follow up with gravity present, in sometime. The dynamics of that system is quite interesting. Also, I saw your problem on the RLC circuit. Looks fun. Will have a go at it soon.
Log in to reply
Will you be posting Part 2 soon?
Log in to reply
@Steven Chase – I have posted it. This took me a while to work through. I think the problem itself is pretty doable, but the dynamics of the system are very strange.
The kinetic energy of the system is T = 2 1 I 1 θ ˙ 1 2 + 2 1 I 2 θ ˙ 2 2 = 3 1 θ ˙ 1 2 + 6 1 θ ˙ 2 2 = 2 1 u ˙ 2 + 3 1 u ˙ v ˙ + 2 1 v ˙ 2 where u = 2 1 ( θ 1 + θ 2 ) and v = 2 1 ( θ 1 − θ 2 ) . The length of the spring is 2 cos 2 1 ( θ 1 + θ 2 ) = 2 cos u , and so the potential energy of the system is V = 2 1 K ( 2 cos u − 1 ) 2 = 1 0 ( 2 cos u − 1 ) 2 Thus the Lagrangian for the system is L = 2 1 u ˙ 2 + 3 1 u ˙ v ˙ + 2 1 v ˙ 2 − 1 0 ( 2 cos u − 1 ) 2 and so Lagrange's equations give 3 1 u ¨ + v ¨ = d t d ( ∂ v ˙ ∂ L ) = ∂ v ∂ L = 0 and 9 8 u ¨ = u ¨ + 3 1 v ¨ = d t d ( ∂ u ˙ ∂ L ) = ∂ u ∂ L = ∂ u ∂ ( − 1 0 ( 2 cos u − 1 ) 2 ) from which we deduce that 9 4 u ˙ 2 + 1 0 ( 2 cos u − 1 ) 2 = 1 0 ( 2 cos u 0 − 1 ) 2 where u 0 is the initial value of u . We want to evaluate A = 2 u ˙ 2 . For the given initial and final angle values we obtain A = 2 . 6 4 3 4 5 0 2 0 5 .